
һ������ʵ�ַ�ʽ
S7-200 SMART �ṩ���� PID ʵ�ַ������������Ժ����ó����������£�
-
PID �����Ƽ���ѧ�ߣ�
- ͨ�� STEP 7-Micro/WIN SMART �����еġ����� �� PID �����á�
- �Զ��������/������������ɵ����ӳ���
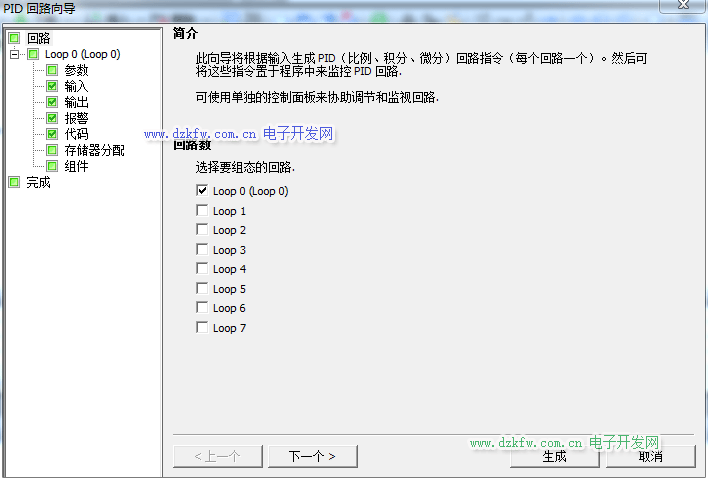
- ֧����� 8 ����·��V2.8 ���¹̼����� 16 ����·��V2.8 �����ϣ���
-
PID ָ������ʺϽ����û���
- ֱ�ӵ���PIDָ��ܿ飬���ֶ�������·����36 �ֽ� V ������
- ����/�������Ϊ 0.0�C1.0 ��ʵ�������ٷֱ����̣���
-
�Ա�� PID��ͻ��ͨ�����ƣ�
- ��ͨ�� SCL �� LAD ��д�Զ��� PID �ӳ���
- �����Ͽ�֧�� ���� 16 ·�������� CPU ɨ�����ں��ڴ� ��
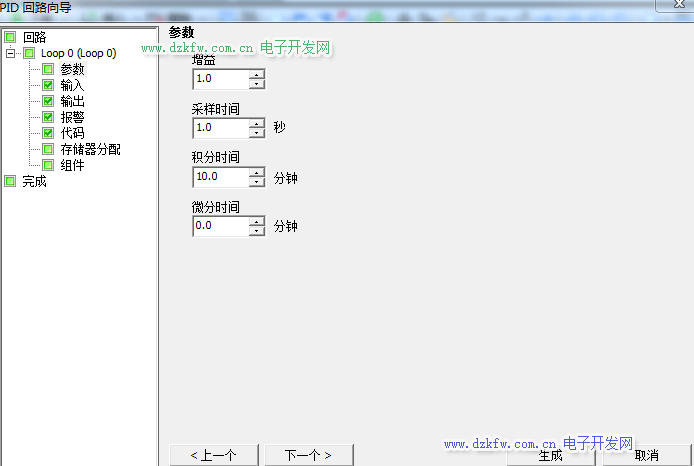
�����������ò��裨ʹ�� PID ��
-
������
���� �� PID �� -
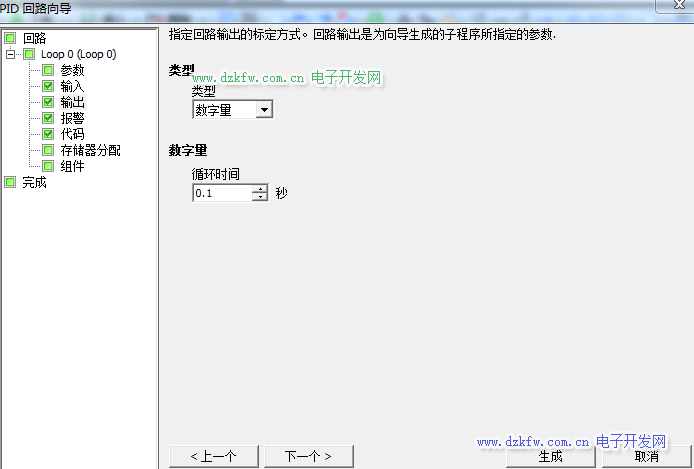
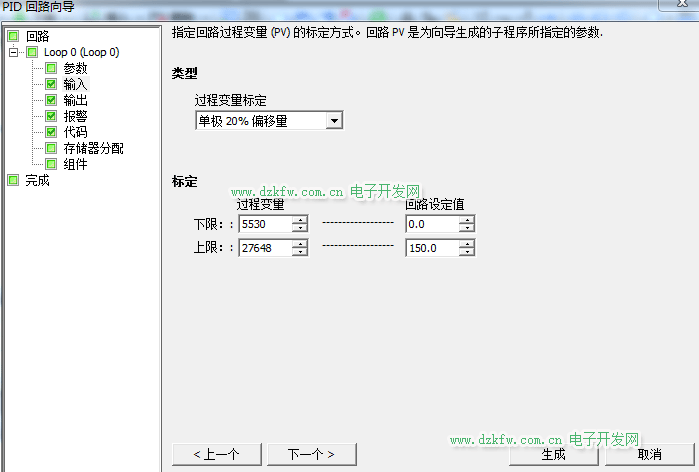
���û�·������
- ��·�ţ�Ĭ�� 0�����·ʱ���ε�������
- �趨ֵ��Χ����0.0�C100.0����Ӧ�¶� 0�C100�棩��
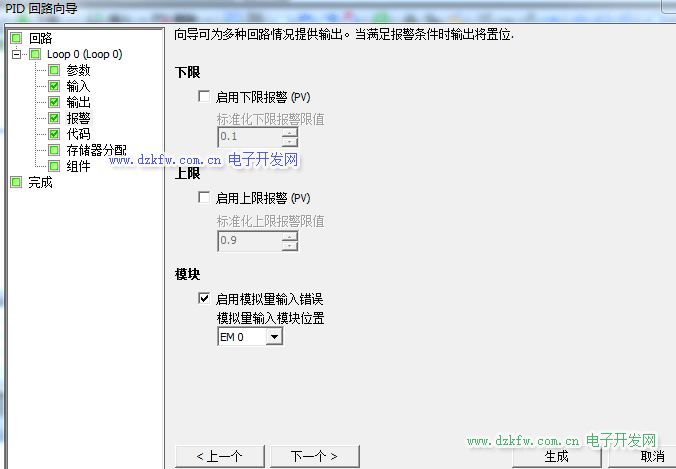
- �������ͣ�ѡ�����ԣ�0�C10V ��Ӧ AIW16����
- ������ͣ�ѡ������������� Q0.6 ���� SSR����
- �������ã����Խο��ݲ����á�
-
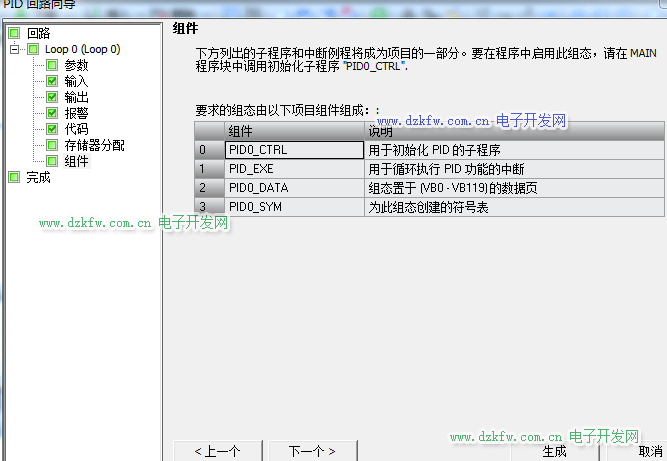
���ɴ�����
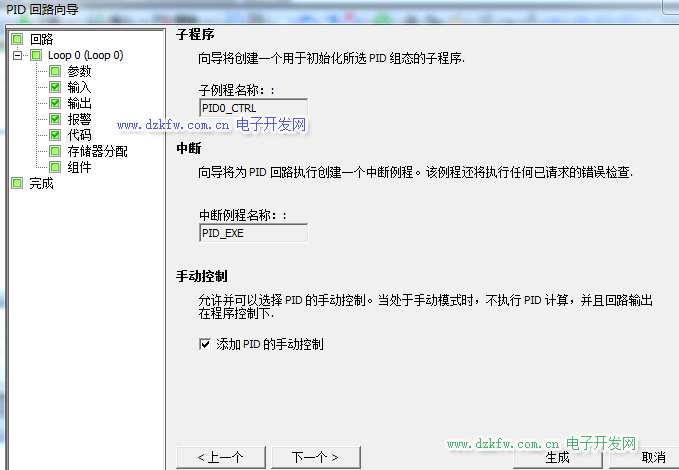
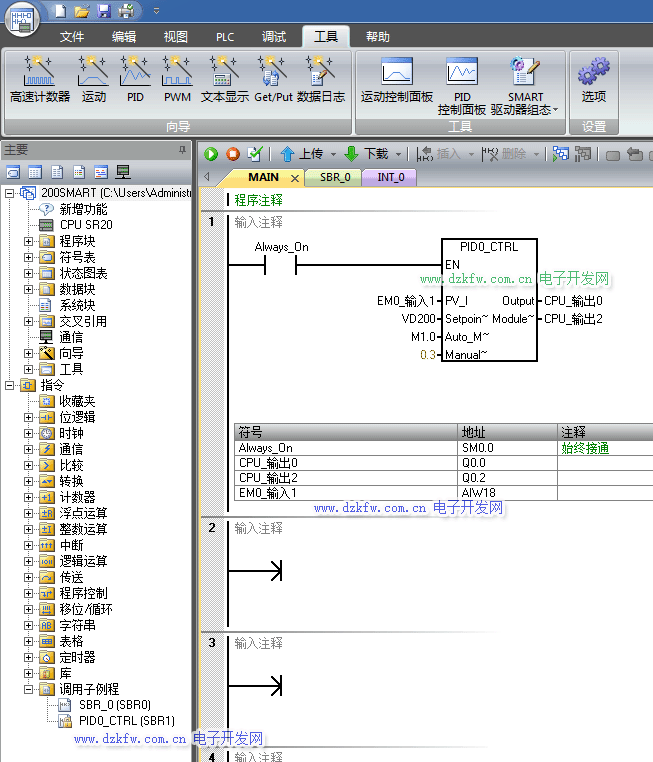
���Զ����ɳ�ʼ���ӳ�����PID0_INIT�����������ӳ�����PID0��������OB1�е��á� -
Ӳ��������
- �¶ȴ��������� PT100+���������� ģ�������루�� AIW16����
- ���Ȱ�/��ŷ� �� ��̬�̵�����SSR���� PLC ����������� Q0.6����
ʵ����
������200SMARTPLCPID�¶ȿ��Ƴ�����
����/ԭ��
- ������200SMARTPLC+EMAM06ģ����ģ�飬PT100һ������������һ��
����/����
-
1.����
24V+----------------PT100 ��
24V__ ------------ PLC ͨ��0-
PT100-- ---------- PLC ͨ��0+
-
2.PLC��̬
-
3.�������
 ���ض���
���ض��� ˢ��ҳ��
ˢ��ҳ�� �µ�ҳ��
�µ�ҳ��