
电动牙刷刷头转动的原理,感觉机身是震动的,怎能转化的这个过程?
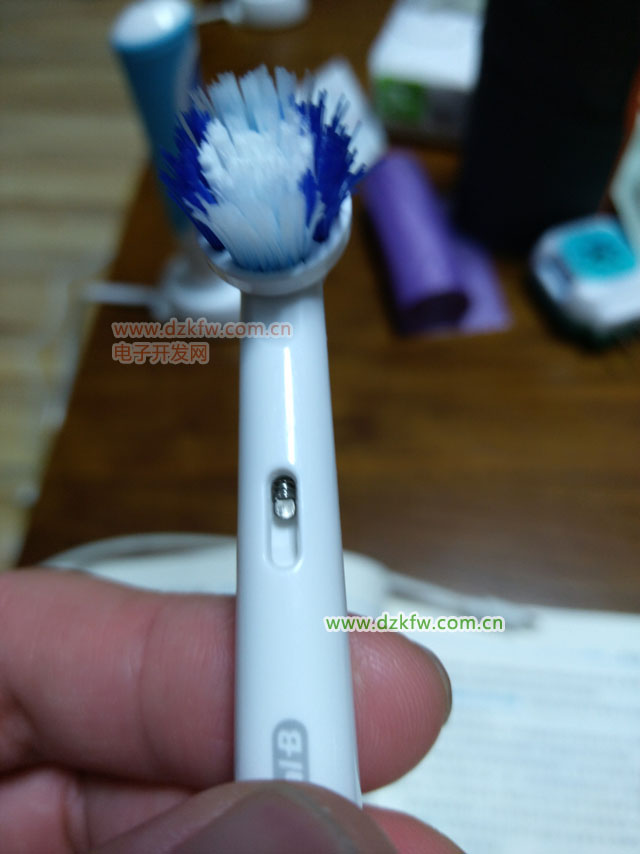
欧乐B电动牙刷运作结构大致可以分为上下两个部分,下面电机上的黄色齿轮带动灰色齿轮曲柄,齿轮曲柄连杆机构通过白色连杆,带动红色曲柄围绕轴心做往复旋转运动。

这一齿轮曲柄连杆机构简图如下所示:
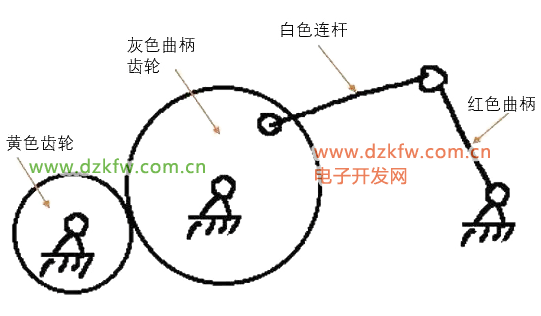
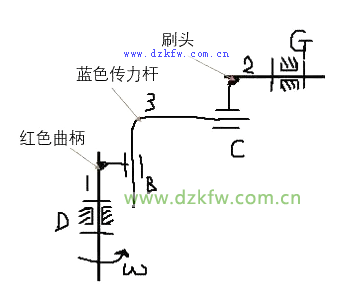
其中红色曲柄的轴心通往上面刷头部分,通过蓝色传力杆带动上面刷头往复旋转运动。
这一结构是比较少见的空间RCCR机构,机构示意图如下所示。
虽然这个自由度算出来是0,但是有论文指出此机构和下一个RCCR运动规律相同,希望有大佬解惑。
另外一种空间RCCR机构如下图所示,主要区别是将传力杆3分成了两根传力杆4、5,中间以转动副A相连。自由度计算为1。
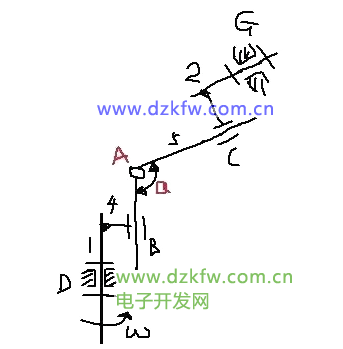
当输入轴1、输出轴2分别以转动副D、G与机架固定连接时,其运动规律与上图机构相同。转动时夹角a不变,转动副A转动自由度消失,称A为消极运动副。消极运动副A可以降低机构的装配误差和难度。
最后来看看上下连在一起是怎么运作的吧。

RCCR机构是指欧乐B电动牙刷中用于实现刷头往复旋转运动的空间连杆机构,其核心是通过齿轮曲柄连杆系统将电机旋转运动转化为刷头的周期性往复旋转。该机构由两个主要部分组成:输入轴通过齿轮传动带动红色曲柄绕固定轴旋转,红色曲柄通过传力杆连接至刷头,形成空间RCCR(转动副-转动副-转动副-转动副)机构。
具体含义:RCCR机构是一种平面连杆机构的空间拓展形式,由四个转动副(R)和两个连杆(C)组成,其中:
- 输入轴1和输出轴2通过转动副D、G与机架固定连接
- 传力杆3(或分拆为4、5)通过转动副A相连,形成单闭环结构
- 当输入轴旋转时,红色曲柄绕固定轴做往复旋转运动,输出轴(刷头)同步实现周期性旋转
延伸拓展:
- 运动学特性:该机构自由度计算为0(理论过约束),但通过消极运动副A(转动副A)消除冗余自由度,使运动规律等效于单自由度机构,降低装配误差
- 工程应用:常见于精密传动设备,如电动牙刷、钟表机构等,通过空间结构优化实现紧凑设计
- 设计优化:采用双传力杆分拆结构(RCCR4-5)可将自由度提升至1,减少装配难度,同时确保夹角α不变,维持运动一致性
- 行业价值:该机构通过齿轮-曲柄-连杆的协同运动,实现刷头左右旋转与前后震动的复合清洁效果,是电动牙刷领域典型的精密传动解决方案
运动副就是两个构件直接接触,并且能产生相对运动的活动联接。它是机械机构中实现运动传递的关键部分,缺一不可。
- 得有两个构件:构件是独立的运动单元,几个零件刚性连在一起也算一个 。
- 必须直接接触:点、线或面得挨着,不能通过中间件间接连,否则不算 。
- 能够相对运动:连上后还得能动,要是焊死固定住那就不是运动副了 。
- 低副:面接触,像转动副(门铰链)、移动副(活塞),接触面积大,耐磨且承载力大 。
- 高副:点或线接触,像齿轮副、凸轮副,接触应力大,能搞复杂运动但容易磨损 。
机械自由度(Degree of Freedom of Mechanism)是机械原理中的核心概念,指一个机构具有确定运动时所必须给定的独立运动参数的数目,通常用符号F表示。它决定了机械系统是能够运动的“机构”(F>0)还是不能相对运动的“结构”(F=0),是分析和设计任何机械装置的基础。
自由度的计算方法:
对于最常见的平面机构,其自由度F有成熟的计算公式,但在应用时需注意识别特殊结构。
- 通用计算公式:平面机构的自由度计算公式为 F = 3n − 2PL − P H 。其中,n代表机构中活动构件的数量(不包括固定不动的机架);P_L代表低副的数目(即面接触的运动副,如转动副、移动副,每个低副引入2个约束);P_H代表高副的数目(即点或线接触的运动副,如齿轮副、凸轮副,每个高副引入1个约束)。
- 公式的推导逻辑:该公式基于“总自由度减去总约束”的原理。假设所有构件都自由,n个活动构件在平面中共有3n个自由度。随后,每引入一个低副(如铰链)会限制2个相对运动,带来2个约束;每引入一个高副会限制1个相对运动,带来1个约束。因此,机构的实际自由度即为总自由度减去所有运动副带来的约束总数。
- 计算中的关键问题:直接套用公式有时会出错,必须准确处理复合铰链(一个铰链连接两个以上构件时,低副数应相应增加)、局部自由度(如凸轮机构中的滚子,其转动不影响整体运动,应排除)和虚约束(重复而不起独立限制作用的约束,应去除)这三种特殊情况。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底