
序言:
雷达(Radar)是利用定向天线向外发射电磁波,然后根据目标反射的电磁波信号特征,来获取目标的距离、位置、速度等信息。通常雷达测距的方法有三种:脉冲法测距、调频连续波法测距、相位法测距;常用的为前两种。脉冲法测距分辨率和脉冲宽度有关,要达到更高的分辨率困难比较大;而调频连续波雷达,可以用相对简单的硬件,实现高精度距离测量,并且可以同时测量目标的速度信息。
FMCW雷达基本原理:
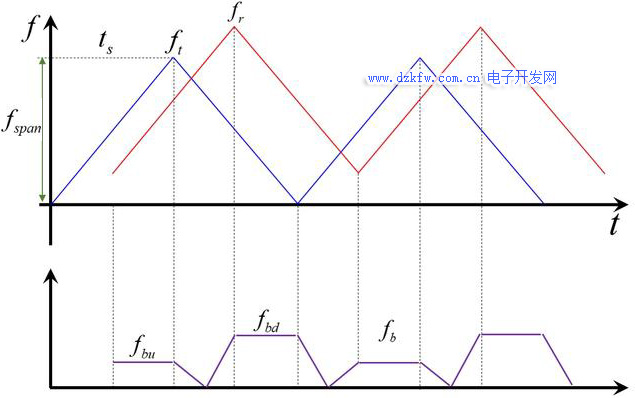
调频连续波雷达(FMCW)的基本原理如下图所示(以三角波为例):
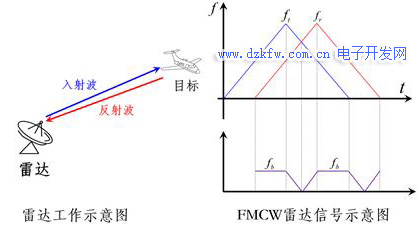
FMCW雷达基本原理
雷达发射频率随时间变化的三角波信号,该信号经目标反射之后被雷达接收。因为发射信号和接受信号之间有一定的时间差,并且发射信号的频率是随时间变化的;所以在发射信号和接收信号之间有一定的频率差;距离越大、频差就越大。通过频差和距离之间的某种关系,可以测得目标的距离。
另外,如果是相对雷达运动物体,因为多普勒效应,会有一定的额外频偏;通过提取这个额外的频偏、并和目标速度取得一定的关系,就可以得到目标的速度信息
静止目标的距离测量:
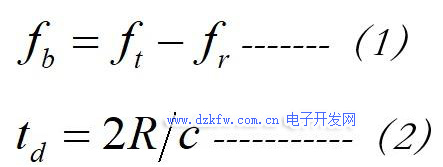
图(2)为FMCW雷达信号示意图;设发射的三角波为 、反射回来的波为 ,目标和雷达之间距离为R、发射波和接收波之间的延迟为 ;则任一时刻发射波和接收波的频率差为:
设ts为调频波周期的一半、fspan为调频波扫频带宽,根据如图有如下关系:
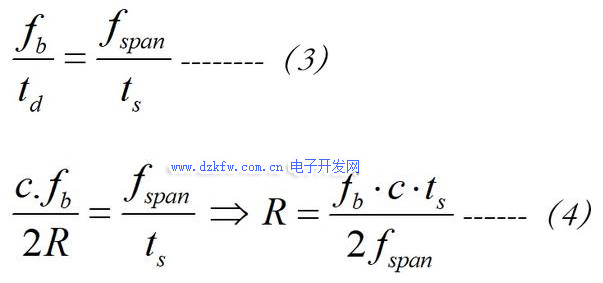
公式根据反射波和入射波的频率差fb,可以得到距离信息。根据扫频周期和扫频带宽,能计算出每赫兹频率差、反映的距离信息。从公式可见,扫频带宽越宽,距离分辨率越高;同样扫频带宽下,载波频率越高(ts越小)、距离分辨率越高。在其他参数固定的情况下,距离和差频成函数关系。
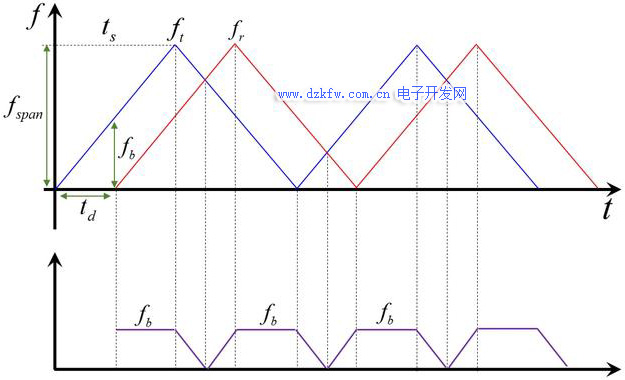
图二:静止目标的FMCW雷达信号示意图
运动目标的距离、速度测量:
如果被测物体是移动的,考虑到多普勒效应,反射波会有一定频移,则入射波和反射波的频率差将会不再恒定(如下图)。设多普勒频移为fd,则有:
设发射信号的中心频率为 ,则多普勒频移为:

其中v为被测物体的速度。
根据前面公式(4)有:
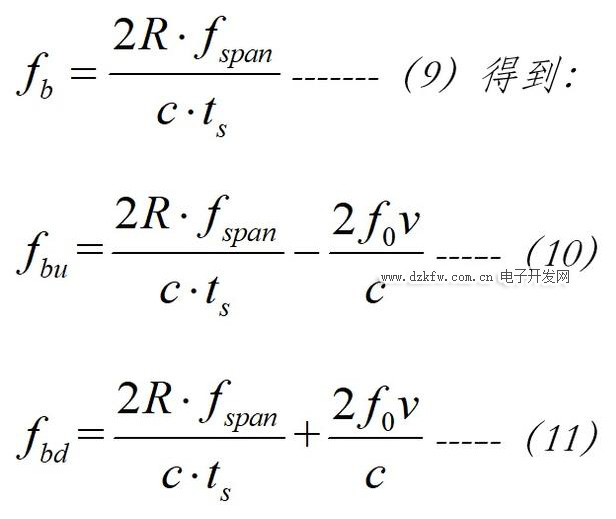
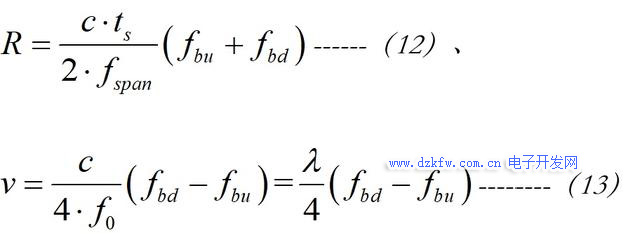
公式(10)、(11)分别相加和相减得到:
图三:运动目标FMCW信号示意图
至此,得到了目标距离和目标速度与雷达反射信号的关系。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底