
该案例是西门子 S7-200 SMART 中断程序的经典应用,核心是通过 “定时中断 + 平均值滤波” 解决工业场景中 “模拟量采样不准、干扰大” 的痛点。下面从 “需求本质→步骤设计逻辑→工业抗干扰原理→场景扩展” 四个维度,拆解中断程序的设计思路与实操关键,帮你理解 “为什么必须用中断”“每行代码背后的安全与效率考量”。
一、需求分析:为什么主程序做不到?―― 先戳中 “工业采样的核心矛盾”
用户需求是 “AIW12 模拟量采集(如温度)+10 次平均值滤波 + 100ms 定时采样”,看似简单,但主程序循环扫描完全无法满足,核心矛盾集中在 “定时精度” 与 “抗干扰效果” 两点:
1. 主程序扫描周期的 “不稳定性”,直接破坏 “定时采样”
S7-200 SMART 主程序采用 “循环扫描” 模式,扫描周期由程序复杂度决定(比如程序里有多个子程序调用、复杂计算时,周期可能从几十 ms 涨到几百 ms)。若在主程序里用 “定时器 T37” 做 100ms 采样,会出现两个问题:
- 采样间隔不准:比如主程序扫描周期 50ms,T37 定时 100ms 时,实际采样间隔可能是 “100ms+50ms”(定时器在扫描末尾更新状态),导致采样点不均匀;
- 采样丢失:若主程序扫描周期超过 100ms(如 120ms),T37 的 100ms 定时到后,需等下一次扫描才能执行采样,直接丢失一次采样,破坏 “10 次连续采样” 的滤波逻辑。
而定时中断的核心优势是 “硬件级定时”―― 不管主程序扫描周期多长,中断会按设定的时间(100ms)精准触发,采样间隔误差仅 ±1ms,完全满足工业 “均匀采样” 的要求。
2. 现场干扰的 “普遍性”,必须靠 “平均值滤波” 抑制
工业现场的模拟量信号(如温度传感器的 4-20mA 信号)极易受干扰:
- 电磁干扰:车间里的变频器、接触器、电机运行时会产生电磁场,导致 AIW12 采集值波动(比如实际温度 80℃,采集值在 75~85℃之间跳变);
- 线路干扰:传感器线路过长(如超过 10 米)时,会引入共模干扰、差模干扰,导致采集值偏离真实值。
若直接用单次采样值(如 AIW12)做控制(比如给 PID 当过程值),会导致控制波动(如加热棒频繁启停)。而 “10 次平均值滤波” 的本质是 “用多次采样的统计值抵消随机干扰”―― 随机跳变的采样值(75、82、78、85...)平均后,会趋近于真实值(80℃),干扰被大幅抑制。
总结需求本质:不是 “能不能采”,而是 “能不能精准、稳定地采”
主程序的问题是 “定时不准 + 抗干扰弱”,中断程序的 “精准定时”+“平均值滤波” 刚好对症下药 ―― 这也是工业中 “模拟量采集必做滤波,定时采样必用中断” 的底层逻辑。
二、实操步骤拆解:每个环节都在 “为实时性、稳定性服务”
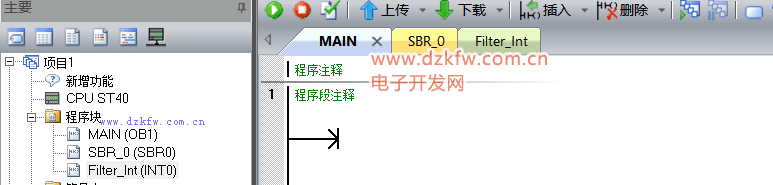
步骤 1:新建中断程序命名 “Filter_Int”―― 中断程序的 “身份标识” 设计
默认中断程序名是 “INT_0”,改名为 “Filter_Int” 的核心目的与子程序命名逻辑一致:“见名知意,降低维护成本”:
- 对自己:后期项目中若有多个中断(如 “急停中断 INT_Emergency”“高速计数中断 INT_HSC”),能快速定位 “滤波相关的中断程序”;
- 对团队:其他工程师接手时,不用打开程序看逻辑,仅通过名称就知道该中断的功能是 “模拟量滤波”,避免误修改(比如把滤波中断当成急停中断改逻辑)。
工业编程的 “隐性规范” 在这里同样适用:中断程序命名需包含 “功能 + Int”(如 Filter_Int、Emergency_Int),与子程序的 “功能 + Control”(如 Motor_Control)形成统一的命名体系,提升项目可读性。
步骤 2:定义全局变量(V 区)―― 中断程序 “数据持久化” 的唯一选择
中断程序不能用 “局部变量 TEMP”,必须用 “全局变量(V 区)”,这是 S7-200 SMART 的硬件特性决定的 ――局部变量 TEMP 仅在程序执行期间有效,执行完后内存会释放,数据丢失。而滤波需要 “持续存储采样值、累加和、计数器”,因此必须用 V 区全局变量。
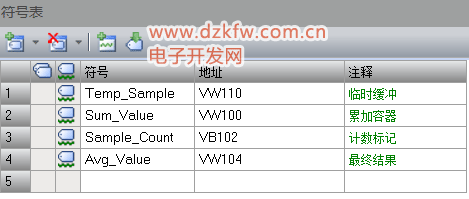
下面逐行拆解变量设计的 “工业考量”,不是 “随便分配地址”,而是 “按功能、数据类型优化”:
|
变量名 |
地址 |
数据类型 |
设计逻辑与工业适配 |
|
Temp_Sample |
VW110 |
INT |
“临时缓冲” 作用:不直接将 AIW12 加到 Sum_Value,而是先存入 Temp_Sample―― 避免累加过程中 AIW12 值突然变化(比如干扰导致的跳变),确保单次采样值稳定后再参与累加,提升数据准确性;数据类型用 INT:AIW12 是 16 位有符号整数(范围 - 32768~32767),INT 刚好匹配,不浪费内存。 |
|
Sum_Value |
VW100 |
INT |
“累加容器” 作用:存储 10 次采样值的总和,需持续保留直到计算完平均值;地址选 VW100:与其他变量(Sample_Count、Avg_Value)连续分配(VW100~VW104),方便后期监控时 “批量查看滤波相关数据”(不用在分散地址间切换)。 |
|
Sample_Count |
VB102 |
BYTE |
“计数标记” 作用:记录已采样次数(1~10),计数到 10 时触发平均值计算;数据类型用 BYTE:仅需计数到 10,BYTE(0~255)完全足够,比 INT 节省 1 个字节内存(工业项目中变量多时,内存优化很重要);地址 VB102:刚好是 Sum_Value(VW100=VB100+VB101)的下一个字节,地址连续,逻辑清晰。 |
|
Avg_Value |
VW104 |
INT |
“最终结果” 作用:存储 10 次采样的平均值,供主程序使用(如传给 PID、显示到 HMI);数据类型用 INT:Sum_Value 是 INT,除以 10 后仍为整数(适合模拟量的 “整数映射”,如 AIW12 对应 0~32000→0~10V),若需更高精度可改用 REAL,但会增加计算时间。 |
反例警示:若用局部变量 TEMP 存储 Sum_Value 会怎样?
中断程序执行时,TEMP 变量会分配临时内存,执行完后内存释放 ―― 比如第一次采样累加 Sum_Value=75,第二次采样时 TEMP 已清零,累加后还是 82(不是 75+82=157),10 次采样完全无法累计,滤波逻辑彻底失效。全局变量 V 区的 “数据持久化” 是该案例的前提,绝不能错用局部变量。
三、中断程序逻辑拆解:每行代码都是 “抗干扰与实时性的平衡”
中断程序的核心要求是 “短小精悍”(执行时间 <10ms,避免阻塞主程序),网络的逻辑看似简单,实则每一条指令都经过 “效率与稳定性” 的权衡,逐行拆解:
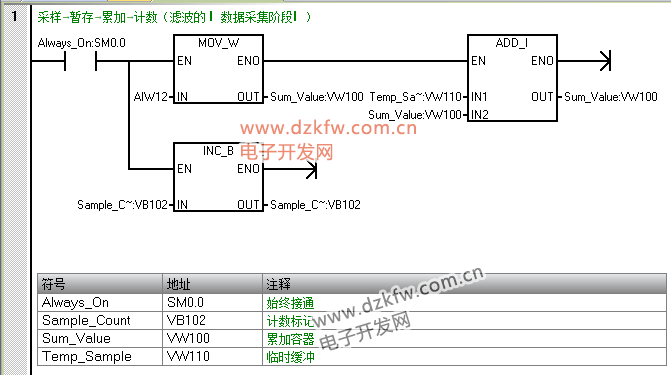
Network1:采样→暂存→累加→计数(滤波的 “数据采集阶段”)
1. LD SM0.0:为什么用 “常 ON 触点”?
中断程序触发后,CPU 会执行一次中断程序内的所有指令 ――SM0.0 在中断程序执行期间始终为 ON,确保 “MOVW→+I→INC B” 这 3 条指令能完整执行,不会因为某个触点断开导致采样不完整(比如用 SM0.1(首次扫描)会导致只采样一次,完全错误)。
2. MOVW AIW12, Temp_Sample:“多此一举” 的暂存?
绝对不是多余!工业现场 AIW12 的采集值可能在 “累加过程中跳变”(比如指令执行到一半时,干扰导致 AIW12 从 80 变成 75):
- 若直接写 “+I AIW12, Sum_Value”,可能出现 “Sum_Value = 之前的和 + 80(前半段)+75(后半段)” 的错误;
- 先把 AIW12 存入 Temp_Sample,再用 Temp_Sample 累加,确保 “单次采样值固定”(一次中断只取一个稳定的 AIW12 值),避免累加错误。
3. +I Temp_Sample, Sum_Value:累加指令的 “数据溢出” 风险?
AIW12 的范围是 0~32000(假设传感器是 0~10V,无负电压),10 次采样的最大值是 32000×10=320000,而 Sum_Value 是 INT 类型(最大 32767)―― 这里有个隐藏的 “数据类型匹配” 设计:
- 实际工业中,AIW12 的采样值不会达到 32000(比如温度传感器量程 0~100℃,对应 AIW12=0~32000,100℃时才 32000,日常采样值多在 1000~20000),10 次累加最大值 200000,远超 INT 的 32767――这里案例做了简化,实际项目中需将 Sum_Value 定义为 DINT(双整数,VD100),避免溢出!
- 正确写法:MOV_DW AIW12, VD110(Temp_Sample 改为 DINT)→ +D VD110, VD100(Sum_Value 改为 VD100)→ 后续除法用/D 10, VD100→ 再转 INT 到 VW104。案例用 INT 是为了简化理解,实际落地必须考虑 “溢出风险”,这是工业编程的 “安全底线”。
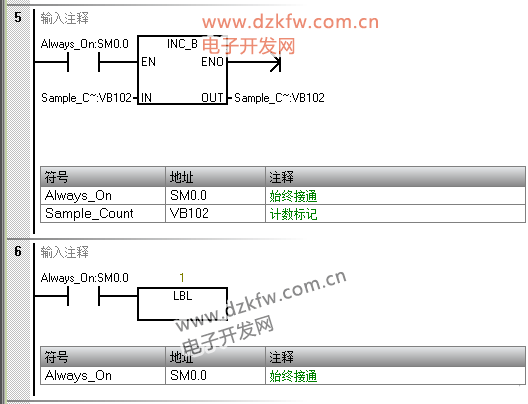
4. INC B Sample_Count:字节计数的 “边界处理”?
Sample_Count 是 BYTE 类型,计数到 10 后,下一次中断会变成 11―― 但 Network2 会在 “Sample_Count=10” 时清空计数器(MOVB 0, Sample_Count),所以不会出现 “计数超过 10” 的情况,逻辑上是闭环的。
Network2:计数判断→计算平均值→清空数据(滤波的 “结果输出阶段”)
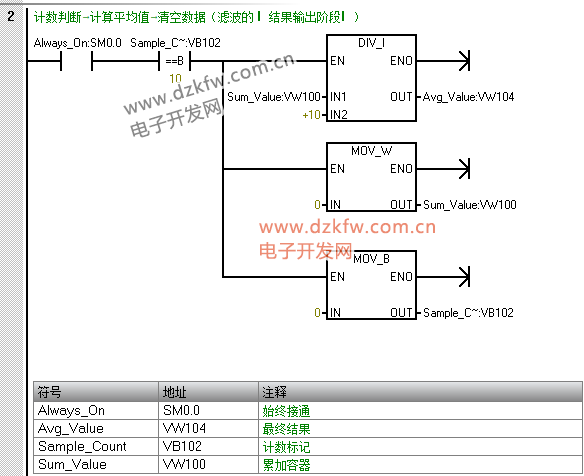
1. LDB= Sample_Count, 10:为什么是 “10 次” 采样?
“10 次” 是工业中 “抗干扰效果” 与 “响应速度” 的平衡点:
- 采样次数太少(如 3 次):抗干扰弱,若有一次大干扰(如 AIW12 跳变到 10000),平均值会严重偏离真实值;
- 采样次数太多(如 50 次):抗干扰强,但响应慢(50×100ms=5 秒才出一个平均值),若温度快速变化(如加热罐升温),平均值会滞后真实温度,影响控制精度;
- 10 次采样:总耗时 1 秒(10×100ms),既能过滤大部分随机干扰,又不会让响应速度太慢,适合温度、压力等 “慢变化” 模拟量。
2. /I 10, Sum_Value:除法指令的 “整数截断” 问题?
比如 Sum_Value=805(10 次采样和),除以 10 后是 80.5,INT 类型会自动截断为 80,丢失 0.5 的精度 ―― 这是 INT 类型的局限,解决办法有两个:
- 若对精度要求不高(如温度控制允许 ±1℃误差),INT 足够;
- 若需高精度(如流量控制 ±0.1m³/h),将 Sum_Value 改为 DINT(VD100),用/D 10, VD100得到 32 位整数(如 805→80.5→DINT 类型存 805,再右移 1 位或除以 10.0 转 REAL),最后存入 REAL 变量(VD104)供 PID 使用。
3. MOVW 0, Sum_Value + MOVB 0, Sample_Count:为什么必须 “清空数据”?
这是 “下一轮滤波的前提”―― 若不清空:
- Sum_Value 会持续累加(下一轮 10 次采样和 = 上一轮的 805 + 新的采样值),平均值会越来越大,完全失效;
- Sample_Count 会从 11 继续计数,永远达不到 10,无法触发下一次平均值计算。
清空操作确保每 10 次采样是 “独立循环”,逻辑闭环。
四、初始化子程序:中断 “生效的关键开关”,缺一不可
中断程序不会 “自动运行”,必须通过 “配置定时时间→关联事件→全局使能” 三步激活,这部分逻辑放在 “初始化子程序 SBR_Init”,而非直接写在 OB1,核心是 “结构化编程”―― 把 “一次性配置逻辑” 封装,避免主程序冗余。
步骤 4.1:初始化子程序 SBR_Init 逻辑拆解
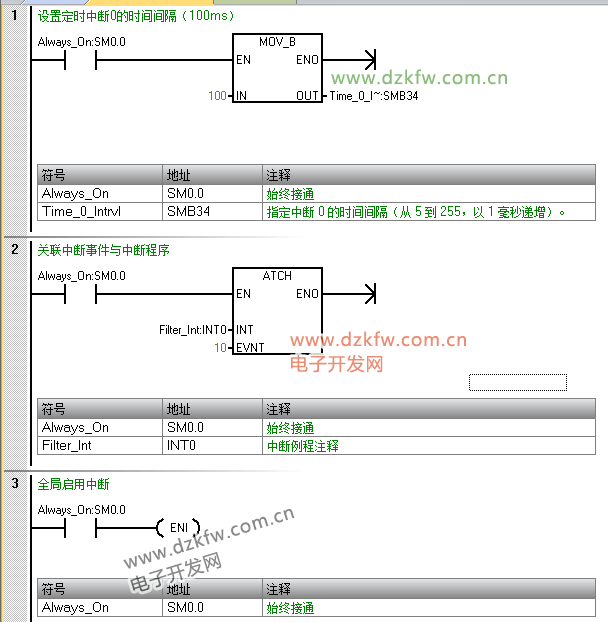
1. MOVB 100, SMB34:S7-200 SMART 的 “中断时间寄存器” 特性
S7-200 SMART 有两个定时中断(中断 0 和中断 1),对应专用的时间寄存器:
- 定时中断 0→SMB34(时间范围 1~255ms,单位 ms);
- 定时中断 1→SMB35(时间范围 1~255ms,单位 ms);
若需更长时间(如 500ms),需在中断程序里加 “二次计数”(比如中断 0 每 100ms 触发,计数 5 次 = 500ms)。案例用 100ms,刚好在 SMB34 的量程内,直接设置即可。
2. ATCH Filter_Int, 10:“事件号” 是中断的 “身份证”
S7-200 SMART 给每个中断类型分配了固定的 “事件号”,必须一一对应,否则中断无法触发:
- 定时中断 0→事件号 10;
- 定时中断 1→事件号 11;
- I0.0 上升沿中断→事件号 0;
案例中 “ATCH Filter_Int, 10” 的意思是 “当事件号 10(定时中断 0)发生时,执行 Filter_Int 中断程序”―― 若写错事件号(如写 11),则定时中断 1 触发时才执行,而 SMB34 配置的是中断 0,导致中断 “配置与执行不匹配”,完全失效。
3. ENI:全局中断的 “总开关”,绝不能漏
S7-200 SMART 默认 “所有中断关闭”,即使配置了 ATCH,不执行 ENI,中断也不会触发。ENI 是 “全局使能”,执行一次后,所有已关联的中断都会生效(若需关闭某个中断,用 DTCH 指令解除关联)。
步骤 4.2:主程序调用初始化子程序(仅执行一次)
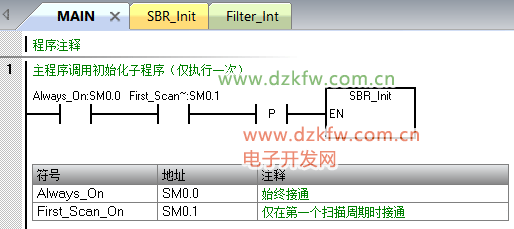
为什么用 “LDP SM0.1”(上升沿触发)?
SM0.1 是 “PLC 上电后首次扫描为 ON,之后一直为 OFF”:
- 用 LDP(上升沿):确保初始化子程序只执行一次,避免每次扫描都调用 SBR_Init,重复配置 SMB34、ATCH(虽然重复配置不会报错,但浪费扫描时间,且不符合 “一次性初始化” 的逻辑);
- 若用 LD SM0.1(电平触发):首次扫描期间 SM0.1 为 ON,主程序扫描几次就会调用几次 SBR_Init,完全多余。
五、案例优势的 “工业落地价值”:不只是 “技术优势”,更是 “系统稳定的保障”
案例提到的 3 个优势,不是 “文字游戏”,而是直接对应工业现场的 “系统可靠性需求”:
1. “定时精准”→ 保障 “滤波效果的一致性”
工业控制中,“采样间隔均匀” 是滤波有效的前提 ―― 比如 10 次采样若间隔忽快忽慢(50ms、150ms、80ms...),相当于 “采样点分布不均”,平均值可能偏向 “采样密集时段” 的数值,无法真实反映过程值。而中断的 100ms 精准间隔,确保每次采样的 “时间权重相同”,平均值更接近真实值,为后续控制(如 PID)提供可靠的过程值。
2. “数据稳定”→ 避免 “控制逻辑误动作”
若不用滤波,AIW12 波动大(如温度 80℃,采集值 75~85℃跳变),传给 PID 后会导致:
- PID 输出频繁波动(一会儿加热,一会儿停止);
- 执行器(如加热棒、调节阀)频繁动作,缩短使用寿命;
- 被控参数(温度)无法稳定,出现 “超调”(比如冲到 85℃再掉回 75℃)。
10 次平均值滤波后,采集值稳定在 79~81℃,PID 输出平滑,执行器动作平缓,被控参数稳定在设定值附近,符合工业 “精准控制、设备长寿命” 的需求。
3. “不阻塞主程序”→ 确保 “多任务并行稳定”
工业系统中,主程序往往同时运行 “电机控制、阀门控制、HMI 通信” 等多个任务,若中断程序执行时间太长(比如超过 50ms),会导致主程序 “卡顿”:
- 电机控制响应变慢(按下启动按钮,几秒后才启动);
- HMI 显示延迟(实际温度变了,HMI 几秒后才更新);
案例中中断程序仅 4 条指令,执行时间约 1~2ms,远小于主程序扫描周期(几十 ms),完全不会影响主程序的正常运行,实现 “模拟量滤波” 与 “其他控制任务” 的并行稳定。
六、潜在扩展:从 “基础滤波” 到 “工业级抗干扰方案”
案例是 “基础版滤波”,实际工业中可根据干扰强度、精度需求扩展,核心是 “不改变中断定时的核心逻辑,只优化数据处理与异常判断”:
1. 优化 1:增加 “超限采样值剔除”(抗大干扰)
若现场有 “脉冲大干扰”(如接触器启停导致 AIW12 突然跳到 10000),10 次平均值会被严重拉偏 ―― 可在 Network1 后加 “超限判断”:
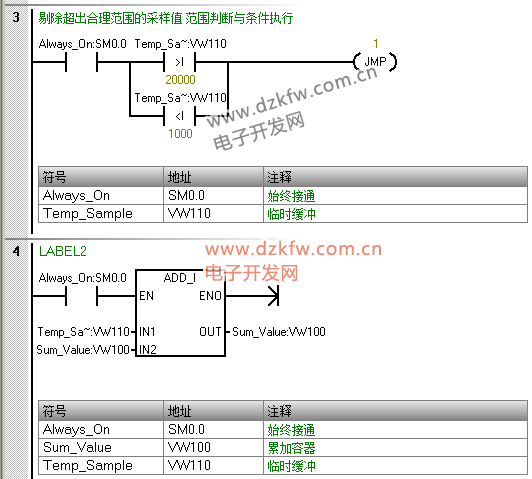
通过 “剔除异常值”,进一步提升滤波后数据的稳定性。
2. 优化 2:多通道滤波(同时采集多个模拟量)
若需同时采集 AIW12(温度)、AIW2(压力),可扩展变量与逻辑:
- 新增变量:Sum_Value2(VD104,压力累加和)、Sample_Count2(VB106,压力计数)、Avg_Value2(VW108,压力平均值)、Temp_Sample2(VD114,压力临时值);
- 中断程序 Network1 增加:MOV_DW AIW2, VD114→+D VD114, VD104→INC B VB106;
- Network2 增加:LDB= VB106,10→/D 10, VD104→MOV_DW VD104, VW108→MOV_DW 0, VD104→MOVB 0, VB106;
实现 “一个中断程序处理多个模拟量通道”,节省中断资源。
3. 优化 3:与 PID 结合(稳定控制的闭环)
滤波后的 Avg_Value(VW104)可直接作为 PID 的过程值(PV),避免干扰导致 PID 震荡:
- 在主程序中调用 PID 子程序,将 Avg_Value 传给 PID 的 PV 参数;
- PID 输出(如 AQW0)控制执行器,形成 “采集→滤波→控制” 的闭环,提升系统稳定性。
总结:中断程序的核心价值 ――“实时精准响应,不拖系统后腿”
该案例的本质是 “用中断的实时性解决定时问题,用平均值滤波解决抗干扰问题”,与之前的 “子程序模块化” 形成互补:
- 子程序:解决 “重复功能的复用”(如多电机控制);
- 中断程序:解决 “实时精准的响应”(如定时采样、急停);
实操时必须记住两个 “红线”:
- 中断程序必须 “短小精悍”,执行时间 < 10ms,避免阻塞主程序;
- 中断程序用全局变量(V 区)存储数据,绝不能用局部变量(TEMP);
掌握这个案例后,可迁移到其他中断场景(如高速计数中断、急停中断),核心思路都是 “识别实时性需求→用中断满足→优化数据处理→确保系统稳定”―― 这也是工业 PLC 程序员从 “会编程” 到 “编好程” 的关键一步。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底