
摘要:具身智能时代,灵巧手通过多模态传感器模拟人类皮肤感知功能。触觉传感器(压阻式、电容式、光学式、磁感式)实现机械刺激感知;六维力传感器提供空间定位和力反馈;主流厂商采用"视觉+触觉+力觉"融合方案。行业趋势聚焦高集成度、通感一体化和低时滞技术,触觉传感、六维力传感及相关材料部件成为发展重点。
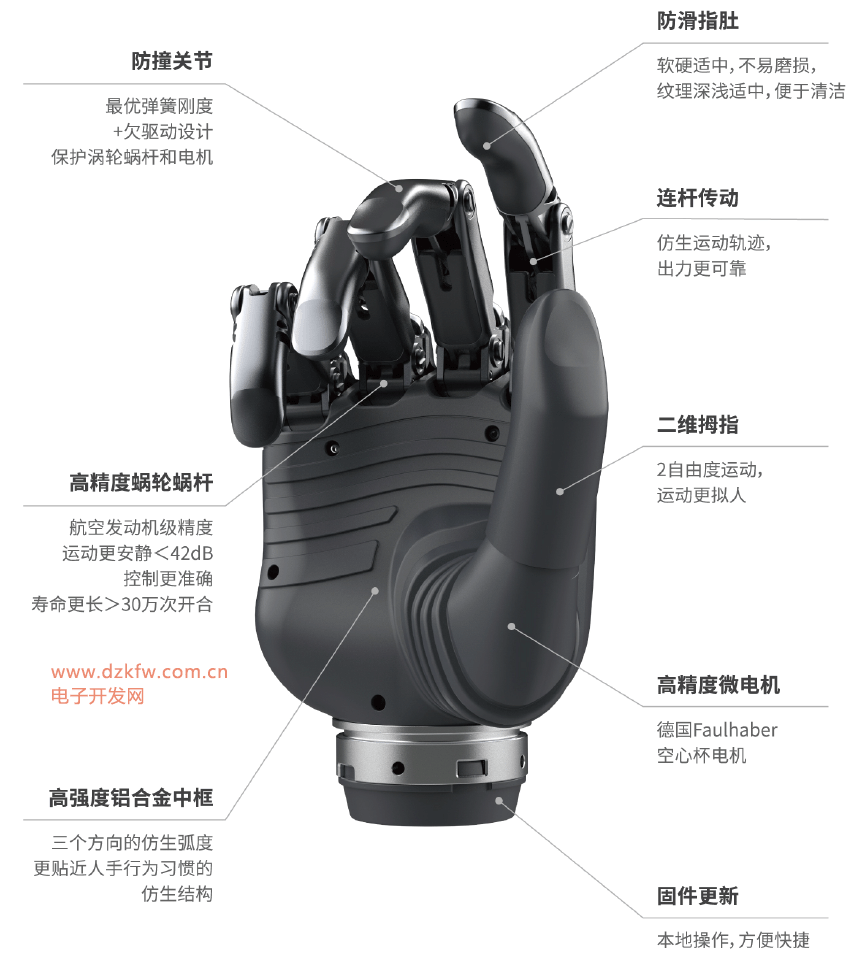
在具身智能的浪潮中,灵巧手作为机器人与物理世界交互的末端执行器,其感知能力的强弱直接决定了操作的精细程度。从第一性原理出发,人类皮肤的感知要素包括机械刺激、温度刺激和本体刺激。为了实现“类人操作”,灵巧手必须集成多模态传感器来模拟这些复杂的生物学功能。
一、 触觉-机械刺激:灵巧手的信息识别核心
触觉传感器是灵巧手的“电子皮肤”,负责感知物体形状、纹理、硬度及接触力。目前主流的柔性触觉传感器通过将压力信号转化为电信号,实现对单维力(垂直压力)和三维力(法向力+切向切力)的测量。
1.1 多样化的感测原理
不同原理的触觉传感器在灵巧手上各展所长:
-
压阻式: 结构简单,通过材料电阻变化测力。如能斯达的柔性压电薄膜方案,通过微观结构设计提高了感应灵敏度。
-
电容式: 灵敏度高,能感测微小形变,常用于三维力检测。
-
光学式(视触觉): 代表方案为 GelSight。通过内置相机捕捉软凝胶表面的形态变化。戴盟机器人已实现毫米级厚度的视触觉传感器,分辨率可达像素级。
-
磁感式: 帕西尼感知利用磁性微粒位移引起磁场变化的原理,实现全表面连续感知。其 ITPU 技术可提供丰富的多维度触觉信息。
1.2 柔性化与电子皮肤
为了适应灵巧手复杂的几何表面,传感器正向“电子皮肤”进化。通过采用导电橡胶、PVDF等柔性材料,或将刚性元件嵌入柔性网状结构中,使灵巧手能够像人手一样紧密贴合抓取目标,实现对物体纹理和重量的精准估计。
二、 位置-本体刺激:六维力传感器的空间维度
如果说触觉传感器是皮肤,那么**六维力传感器(6-Axis Force/Torque Sensor)**就是灵巧手的“肌肉感受器”。它能够同时测量笛卡尔坐标系下的三个向力和三个力矩($Fx, Fy, Fz, Mx, My, Mz$)。
2.1 实现高维空间感知
六维力传感器通常安装在灵巧手的指尖内部或腕部,提供位置-本体刺激:
-
空间定位: 实时感知接触点在空间中的精确位置。
-
闭环控制: 测量全部空间力学信息,为机器人运动学提供力反馈,防止抓取过载或滑脱。
2.2 小型化与解耦挑战
微型六维力传感器是灵巧手硬件的一大难点。由于指尖空间极其狭小(如直径需控制在 15-17mm 左右),必须通过复杂的弹性体结构(如十字梁)设计和先进的维间解耦算法,才能在微小空间内消除各向力之间的相互干扰。
目前,ATI(Nano17 系列)、柯力传感、宇立仪器及坤维科技等厂商在微型化六维力传感器领域处于领先地位。
三、 灵巧手厂商的多模态传感器搭载盘点
目前的主流灵巧手正趋向于“视觉+触觉+力觉”的融合感知:
| 厂商 | 典型灵巧手 | 传感器配置特征 |
| 智元机器人 | 灵巧手方案 | MEMS 触觉 + 视触觉感知,馈压力与纹理。 |
| 帕西尼感知 | DexH13 GEN2 | 搭载 1956 颗自研 ITPU 传感器,具备 7824 路信号解析力。 |
| 特斯拉 (Tesla) | Optimus Gen 2 | 指尖集成触觉传感器,用于感知压力与温度。 |
| 因时机器人 | 仿人灵巧手 | 支持集成的力控反馈,适配主流机器人开发平台。 |
| 戴盟机器人 | 视触觉灵巧手 | 采用高分辨率毫米级视触觉传感器,模拟人类指尖感知。 |
四、 行业趋势
灵巧手传感器行业目前处于商业化落地的初期。随着人形机器人对操作精度要求的提升,高集成度、通感一体化、低时滞将成为技术迭代的主旋律。
-
重点关注方向:
-
触觉传感: AI 触感芯片。
-
六维力传感: 力控算法。
-
材料与部件: 驱动模块、高强腱绳。
-
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底