
电子凸轮是一种通过电子控制实现机械凸轮功能的装置,广泛应用于自动化设备和工业控制系统中。它通过电子信号控制凸轮的运动轨迹,替代传统的机械凸轮,具有更高的灵活性和精确度。电子凸轮通常由控制器、执行器和传感器组成,能够实现复杂的运动控制,适用于化工、钢厂、电厂、矿业等高要求的工业环境。
电子凸轮的工作原理是通过控制器发送信号给执行器,执行器根据预设的程序驱动凸轮运动。其优势在于可以快速调整运动轨迹,无需更换机械部件,大大提高了生产效率和灵活性。此外,电子凸轮还具有寿命长、维护方便等特点。
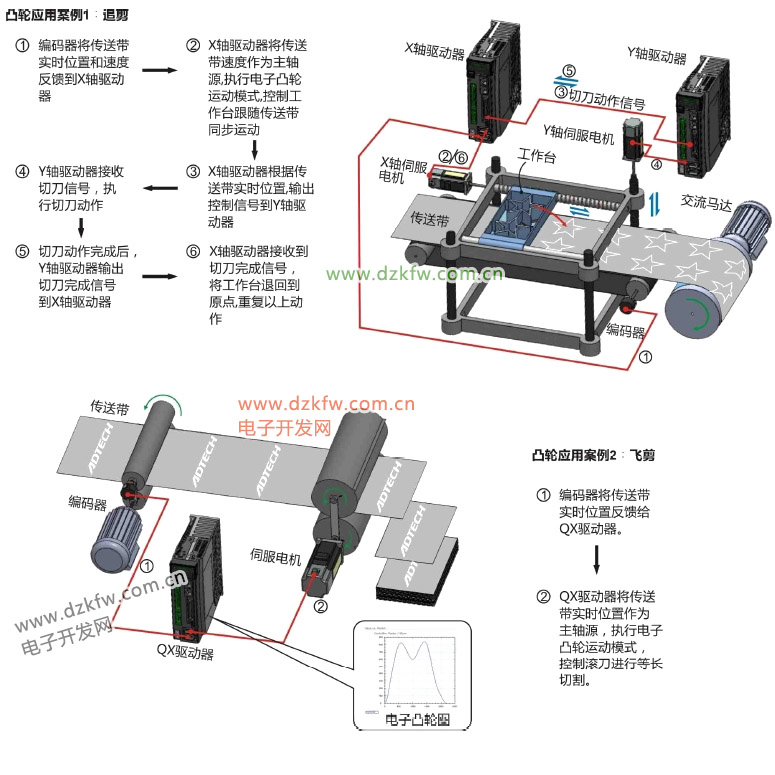
强大的运动控制功能如追剪,飞剪,同步,随动等,适用于包装机、旋切机、印花机、冲孔机、金属,非金属板材、管材的定长切割等。
首先介绍追剪与飞剪的定义以及区别方法:
1、飞剪:剪切机构一般为圆周运动,与被剪切物体同向运动,通过改变剪切机构运行中的速度,达到改变剪切长度的目的。
2、追剪:剪切机构平行于被剪切物体,剪切机构做往复运动,通过改变在非同步区的速度达到改变剪切长度的目的。
共同点:飞剪与追剪都分为非同步区与同步区的概念,要求同步区剪切机构与被剪切机构速度相同。
不同点:飞剪是圆周运动,同步区小,但是可以做高速运动;追剪是往复运动,同步区大,可以完成较为复杂的剪切、冲压等动作。
如以下动画示意:
追剪功能
飞剪功能
怎样实现电子凸轮
在考虑实现复杂的运动控制时(特别是非线性运动时),电子凸轮是较好的选择,如何实现电子凸轮,我请教了一些人,但是没有得到答案。所以根据经验和猜测、以及IEC61131-3 motion control的一些知识,估计实现的方法如下。如有错漏,欢迎指正。
首先对电子凸轮进行简单的定义:实现主轴和从轴的啮合运动。
实现电子凸轮分为三部分:
1、获取主轴位置;
获取主轴位置有多种方法:一是采用虚拟轴,计算简单准确;二是从主轴编码器获取,将主轴编码器信号进行处理;三是从测量编码器获取。获得编码器信号之后,还要将其换算成主轴位置。
2、实现主从轴的啮合
实际上是获取主从轴之间的关系(称之为cam table)。cam table有两种方法表述:一是采用X、Y的点对点关系;二是采用两者的函数关系。cam table的获取也有多种途径:一是采用厂商提供的软件;二是函数关系计算。cam table在运行中的实现根据表述方法的不同也有两种方式:一是根据X、Y的点对点关系查表得到;二是根据两者的函数关系进行计算(特别需要提到的是,有些函数关系可能会根据不同情况而得到不同的函数,也就是函数并不确定。这些西门子轮切手册提到的五次曲线给了我很大的提示)。cam table可以定义多个cam曲线,更具需要切换、拉伸不同的cam。
关系确定和实现后,根据主轴的位置,就能得到从轴的位置。
3、根据从轴位置控制当前轴
通常日系和欧系在根据从轴位置控制当前轴有不同的处理方式,日系的低成本伺服采用输出脉冲的方式,这种方式可能的缺点是丢失脉冲,以及响应的实时性能不足;欧系伺服多采用总线(通讯)方式实现,精确同步的能力更为突出。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底