
这些指令主要是针对用 PLC 直接联动伺服放大器,目的是可以不借助其他扩展设备(例如1GM 模块)来进行简单的点位控制, 使用这些指令时最好配合三菱的伺服放大器 (如 MR-J2)。然而,我们也可以用这些指令来控制步进电机的运行,下面我们来了解相关指令的用法:
这些介绍的指令只适用于 FX1S、FX1N 系列的晶体管输出 PLC,如 FX1N-60MT 。
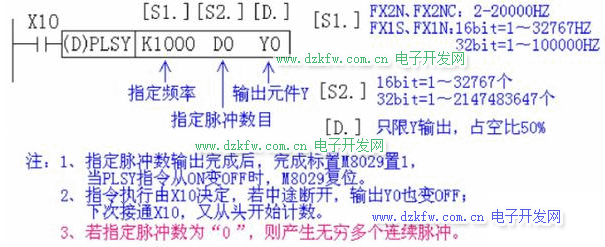
1、 脉冲输出指令 PLSY (FNC57 )
PLSY 指令用于产生指定数量的脉冲。 助记法为 HZ、数目 Y 出来。 指令执行如下:
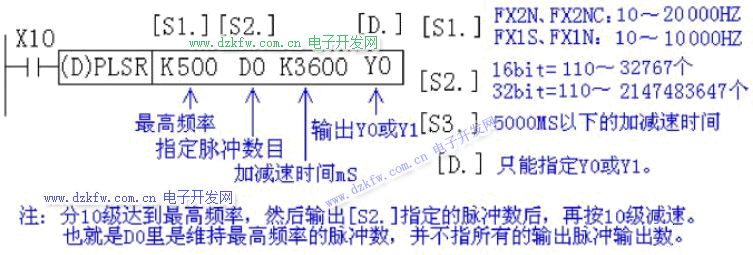
2、 带加减速的脉冲输出指令 PLSR(FNC59)
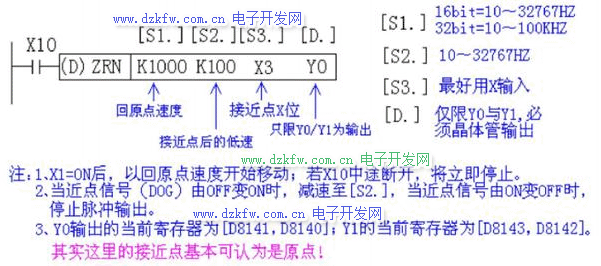
3、 回原点 ZRN (FNC156)-------- 重点撑握
ZRN 指令用于校准机械原点。 助记法为高速、减速至原点。 指令执行如下:
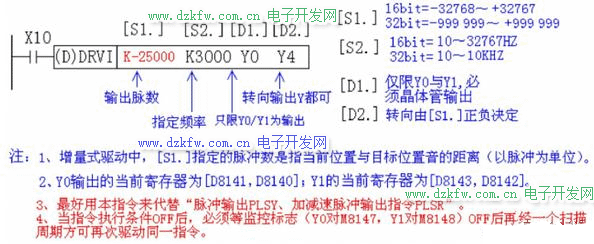
4、 增量驱动 DRVI (FNC158 )-------- 重点撑握
DRVI 为单速增量驱动方式脉冲输出指令。这个指令与脉冲输出指令类似但又有区别,
只是根据数据脉冲的正负多了个转向输出。本指令执行如下:
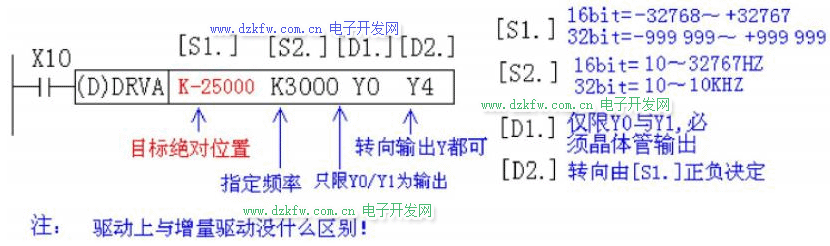
5、 绝对位置驱动指令 DRVA (FNC159 )
本指令与 DRVI 增量驱动形式与数值上基本一样,唯一不同之处在于 [S1.]:
在增量驱动中, [S1.]指定的是距离,也就是想要发送的脉冲数;而在绝对位置驱动指令中,[S1.]定义的是目标位置与原点间的距离,即目标的绝对位置。
下面以此次的设备为例,说明步进电机的驱动方法:
在用步进电机之前,可以考虑以下几个相关的问题:
1、何谓步进电机的步距角?何为整步、半步?何谓步进电机的细分数?
2、用步进电机拖动丝杆移动一定的距离,其脉冲数是如何估算的?
3、在步进顺控中运用点位指令应注意什么?( 切断电源的先后问题! )
步进电机测试程序与接线如下:
1、按下启动按钮,丝杆回原点, 5 秒钟后向中间移动, 2 秒后回到原点。
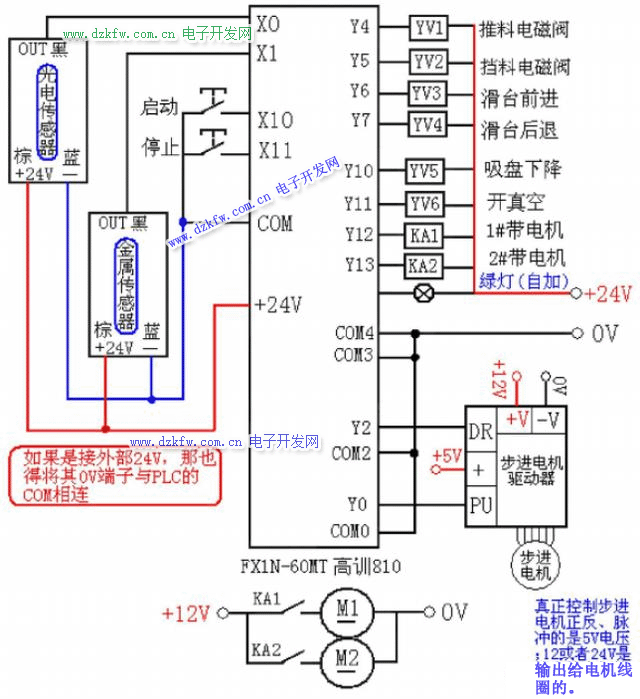
注:步进电机正数为后退, Y2 亮,负数为向前, Y2 不亮。向前方为向 (3#带侧)运动为,向后为向( 1#带侧)运动。
给正数 DDRVI 时,后退 M8029 不动作,没有完成标志;但给负值前进时,会有完成标志M8029 的动作。
为什么会在前进时(有 M8029 为标志时),按停后,可以再次按 X10 启动起来,而在后退 Y2 点亮时,不能再按 X10 启动呢?
M8029 标志位必须在同一扫描周期内捕捉,而且要紧邻相应的点位控制指令下一步!

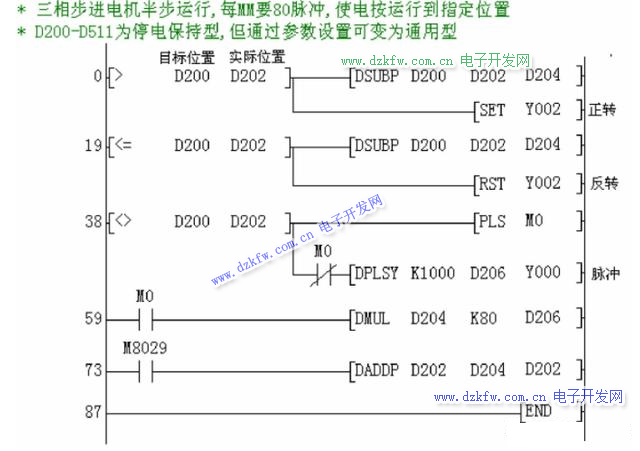
2、另一个示例:
要求制做一个触摸屏画面,输出指定的位置( MM 为单位),让步进电机运动到指定位置后停下。假定工件指定位置大于实际位置值,电机正转到位;反之,反转到位。且步进电机走 1MM 要 80个脉冲。
以上,欢迎动动手分享及收藏!
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底