
编码器一般用来实现对机械运动的速度、位置、角度和距离进行检测,编码器分为旋转式增量编码器和绝对值编码器两种,旋转式增量编码器输出信号为高速脉冲信号,而绝对值编码器输出信号为格雷码,需要实现对转速的测量可选择旋转式增量编码器,把编码器和电机轴连接一起使得电机旋转一圈,编码器随着旋转一圈。

二、测量方法
已知:所选编码器为欧姆龙E6B2-CW26C信号的旋转式增量编码器,每转一圈输出脉冲数为1000。 计算方法:使用高速计数器记录编码器发出的脉冲数量,然后通过西门子提供的频率计算库指令,把记录到的脉冲数换算成频率,然后在根据频率除以每转的脉冲数可得到每秒多少转的转速。 频率测量库指令:西门子提供了频率测量库指令Frequency,可以把通过高速计数器采集到的脉冲数转换为频率。如下图所示
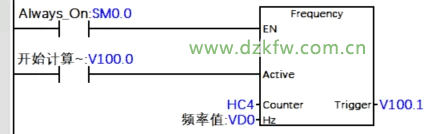
Active:开始进行频率计算,当条件为ON时,开始进行频率计算。
Counter:高速计数器的当前值,选择接受编码器发出高速脉冲的高速计数器
HZ:经过计算后得到的频率
Trigger:用于数据记录的时间触发信号,每完成记录进行一次切换。
三、程序设计编码器与PLC接线图:编码器的接线图如下,编码器的A相和B相脉冲在接入PLC输出点时,根据所选择的高速计数器不一样,接入到PLC输入点的也不同,如下图所示为不同高速计数器在不同模式下所用于接受脉冲信号的输入点。
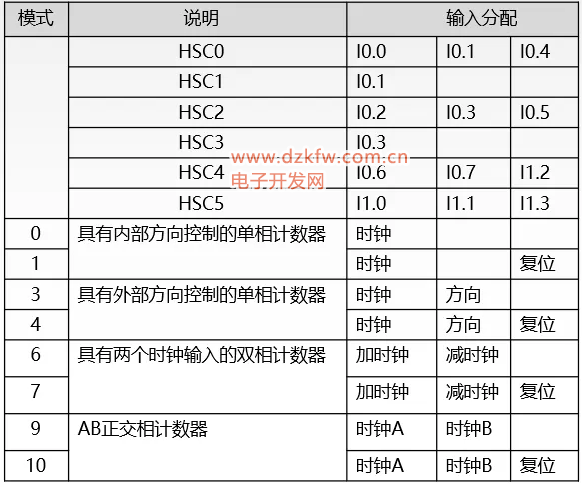
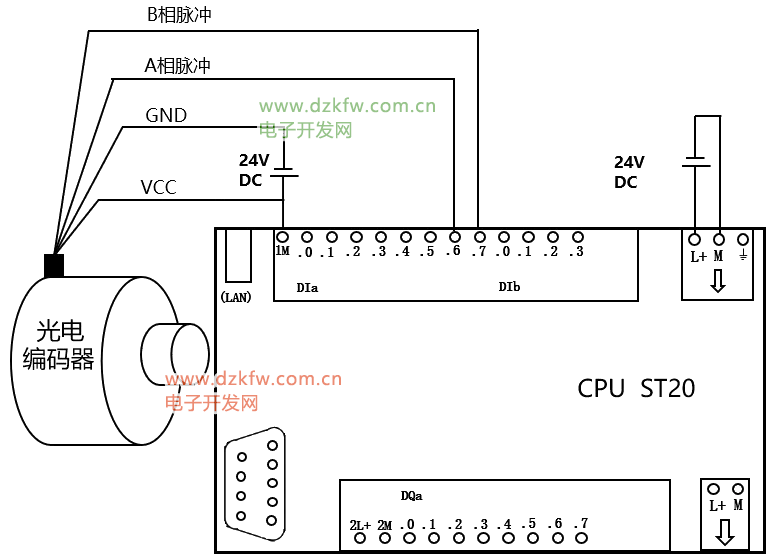
在本实例中,使用高速计数器HSC4来完成编码器输出脉冲信号的记录,所以编码器与PLC的接线图如下所示:
高速计数器:高速计数器的程序可使用运动向导进行配置,也可自行调用指令进行编程,自行使用指令编写是需要定义对应高速计数器的控制字节,初始值,预设值,使用的高速计数器编号和高速计数器的工作模式等。下图为各高速计数器使用相关的特色存储器:

定义高速计数器程序:在本例中定义高速的控制模式,初始值和高速计数器的控制模式,并启用高速计数器指令。
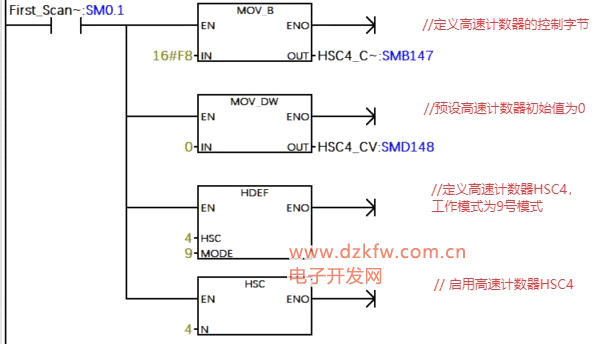
转速计算:调用西门子提供的频率库指令,进行频率计算,把计算出来的频率值放入到VD0中。然后使用计算出来的频率除以编码器的每转给出的脉冲数,最后在程序60分钟,得到转速(单位R/min)。
7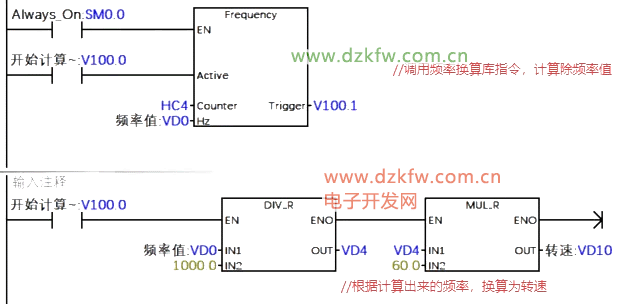
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底