
话说运动控制,大家第一时间想到的是步进、伺服、电机等一系列名词,那么必须要编写程序才能调试和控制步进电机吗?当然不是,在我们S7-200SMART PLC中可以通道运动向导组态后再进行运动控制面板进行简单的调试和控制,接下来就带大家来一步一步实现这个功能。
一、基本概念S7-200SMART系列对应标准型的晶体管输出型PLC可以支持100KHZ的高速脉冲输出,除ST20的CPU支持2轴的高速脉冲输出外,其余CPU可以支持3轴的高速脉冲输出。
步矩角:每输入一个脉冲信号时,电机转子转过的角度称为步矩角。步矩角的大小可以直接影响电机的运行精度。
细分:细分是指电机运行时的实际步矩角是基本步矩角的几分之一。
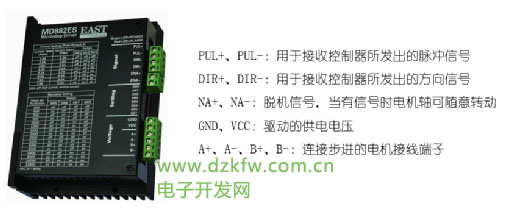
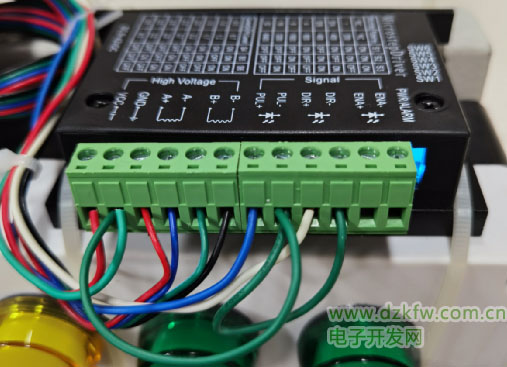
二、步进驱动器接线与细分电流设置第一步:(步进驱动器接线)
第二步:(细分与额定电流拨码)
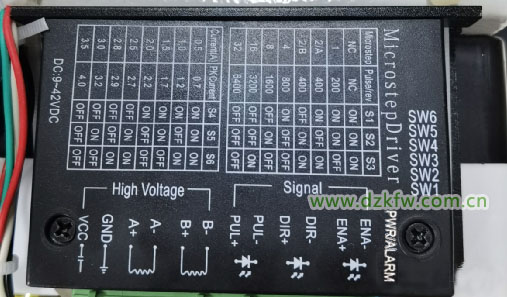


根据以上三张图片可得
细分为:电机一转需要的脉冲数1600,SW1、SW2、SW3分别为:OFF、ON、OFF
额定电流:额定电流是1.2A,根据1.2A可在步进驱动器上拨码SW4、SW5、SW6分别为:ON、OFF、ON
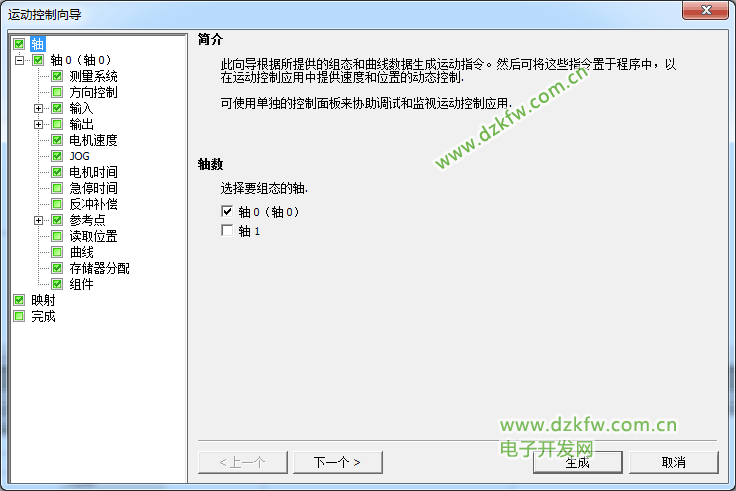
三、编程软件组态配置运动向导第一步:(STEP 7-MicroWIN SMART编程软件―左上角菜单栏―工具―运动)

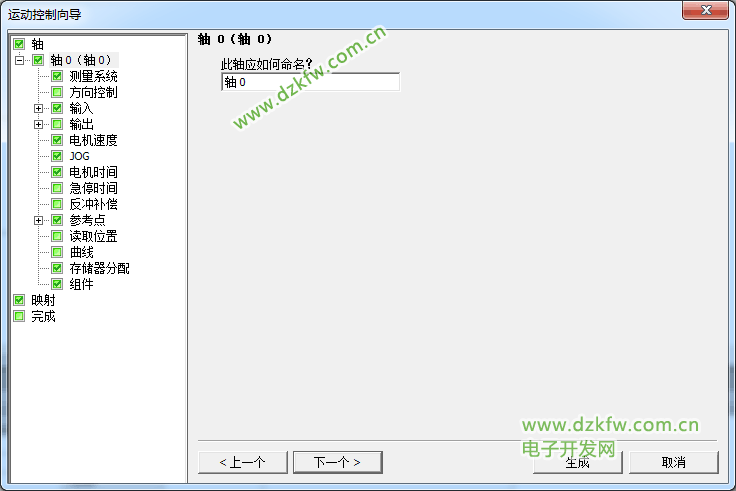
第二步:(选择组态轴0)
第三步:(根据自己的意愿来设置轴名称)
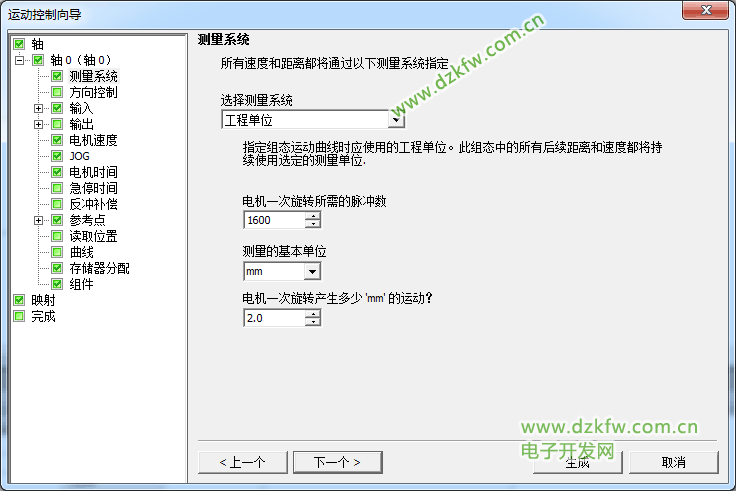
第四步:(测量系统单位―工程单位―电机一次旋转需要的脉冲数1600―测量的基本单位―MM―电机一次旋转产生多少距离的运动―2.0)
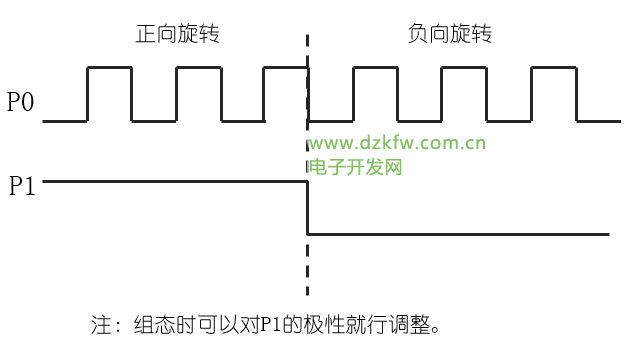
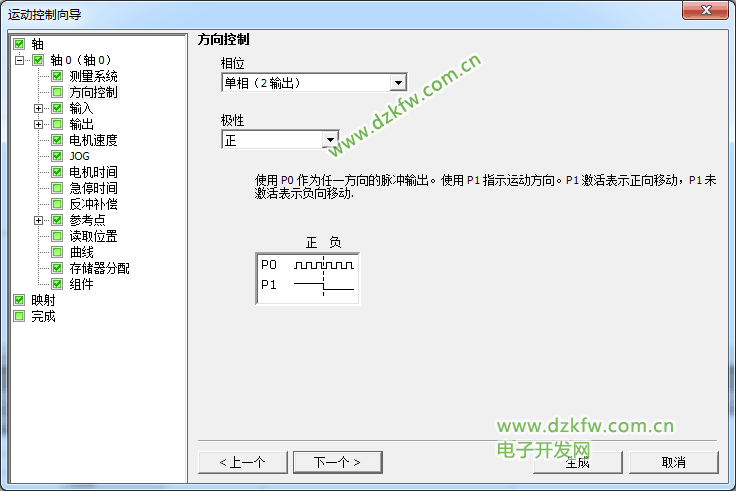
第五步:(方向控制―相位―单相2输出―极性―正)
单相(2输出):组态时如果选择单相两输出,则一个输出(P0)控制脉冲,另一个输出(P1)控制方向。如果需要正向运行时,则P1为高电平有效,如果需要负向运行时,则P1位低电平有效。
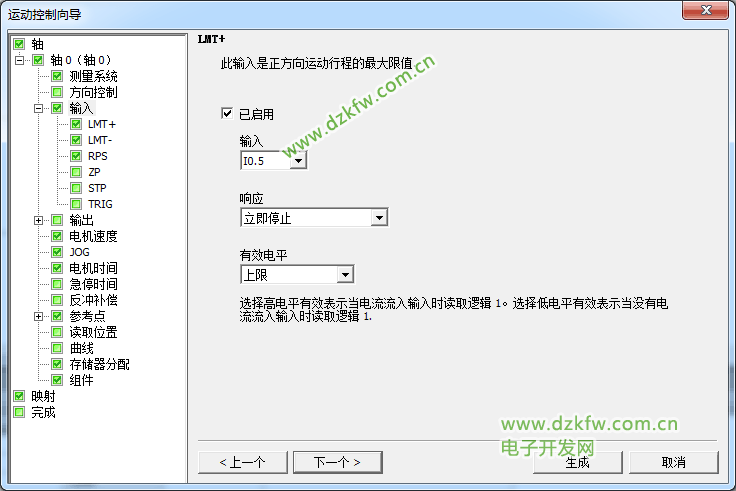
第五步:(正限位―启用―输入I0.5―响应―立即停止―有效电平―上限)
输入I0.5是根据你实际设备正限位开关与PLC接线输入点得来的。
有效电平为什么会是上限呢?因为上限是接常开感应到接通变成常闭,下限反之。
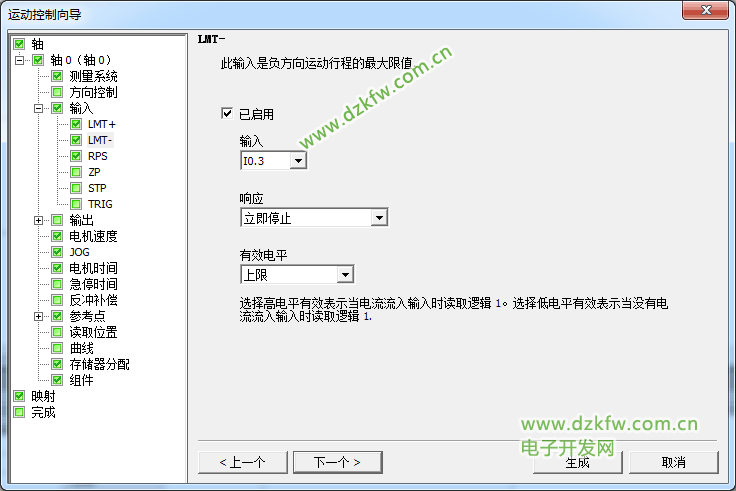
第六步:(负限位―启用―输入I0.3―响应―立即停止―有效电平―上限)
输入I0.3是根据你实际设备负限位开关与PLC接线输入点得来的。
有效电平为什么会是上限呢?因为上限是接常开感应到接通变成常闭,下限反之。
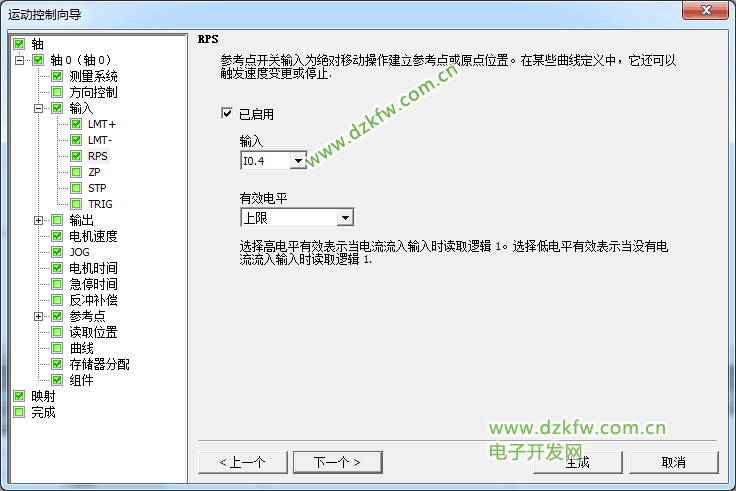
第七步:(回原点―启用―输入―I0.4―有效电平―上限)
输入I0.4是根据你实际设备原点限位开关与PLC接线输入点得来的。
有效电平为什么会是上限呢?因为上限是接常开感应到接通变成常闭,下限反之。
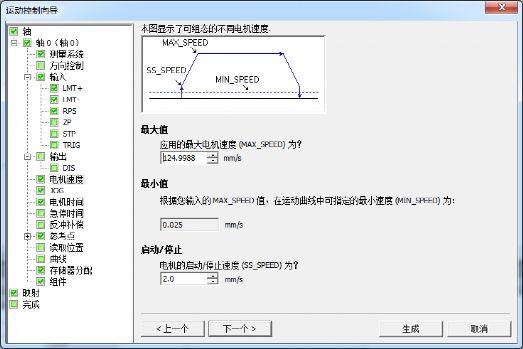
第八步:(最大值―最大电机速度―124.9988―最小值―0.025―启动/停止―2.0MM每秒)
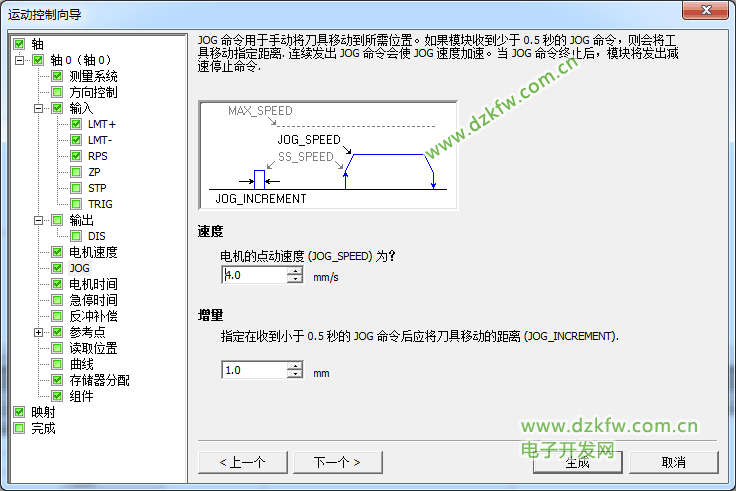
第九步:(点动速度―4.0MM每秒―增量―1.0)
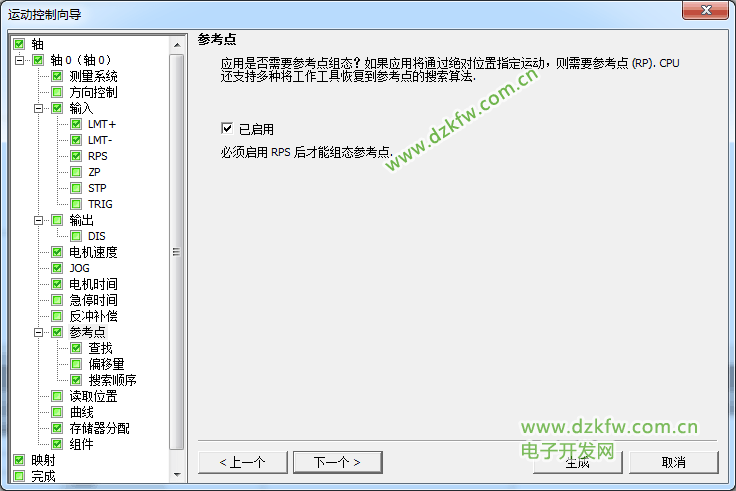
第十步:(启用―RPS参考点,否则不能回原点)
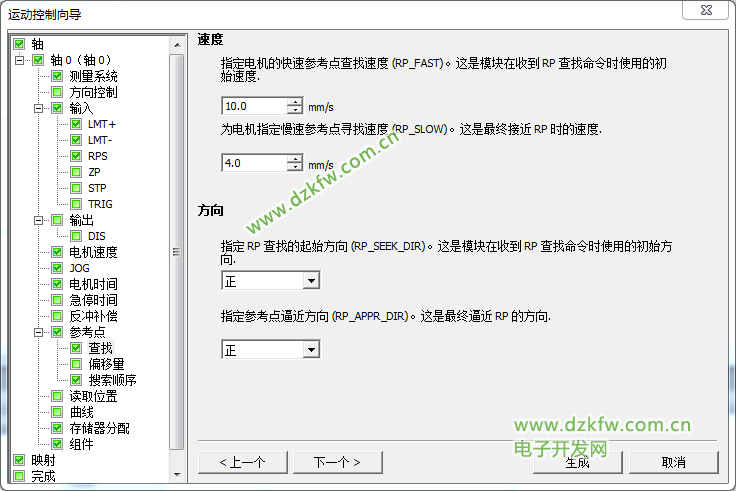
第十一步:(速度―回原点速度―10.0MM每秒―接近参考点速度―4.0―方向都是正)
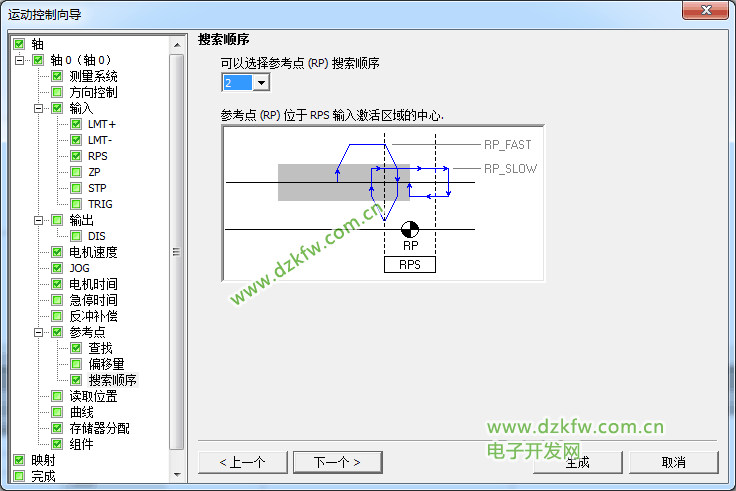
第十二步:(2号模式)
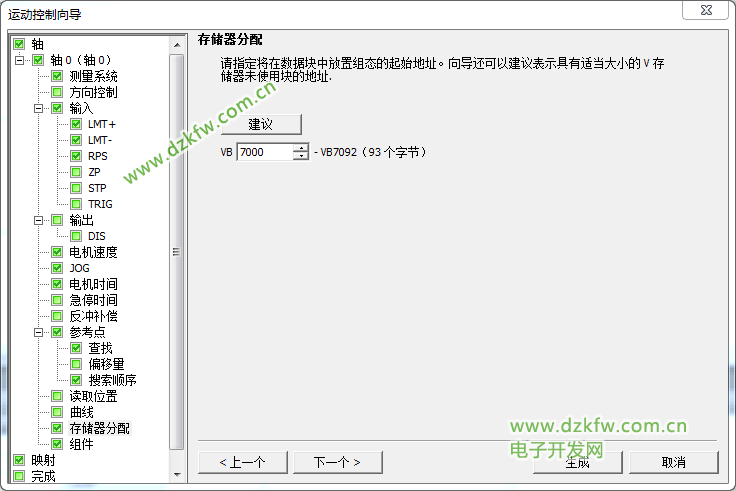
第十三步:(分配存储器地址)
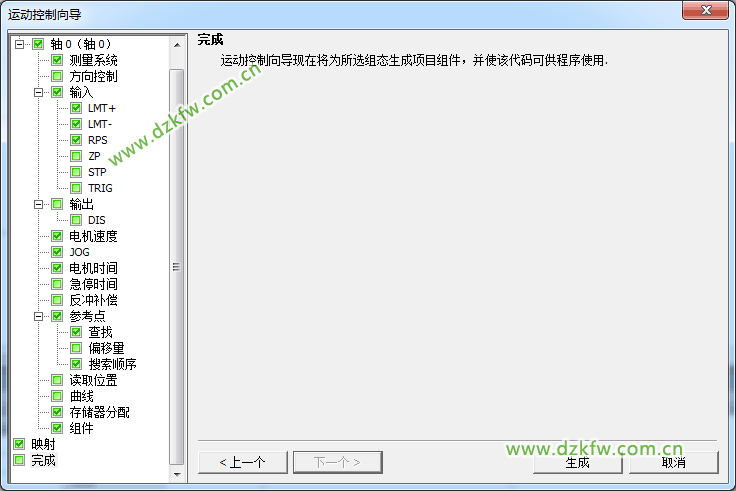
第十四步:(点击生成即可)
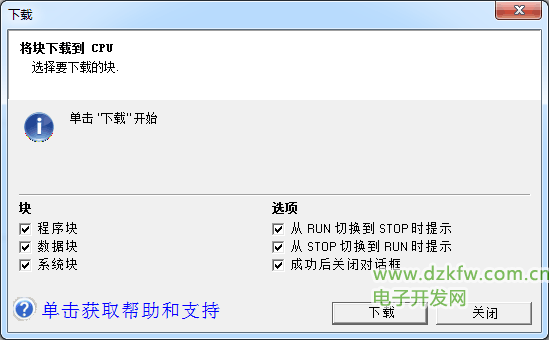
第一步:(把组态配置好的运动向导下载到PLC)
第二步:(一定要把PLC调制到STOP状态不能为RUN运行,因为运动控制调试面板只能在STOP状态运行与调试)
![]()
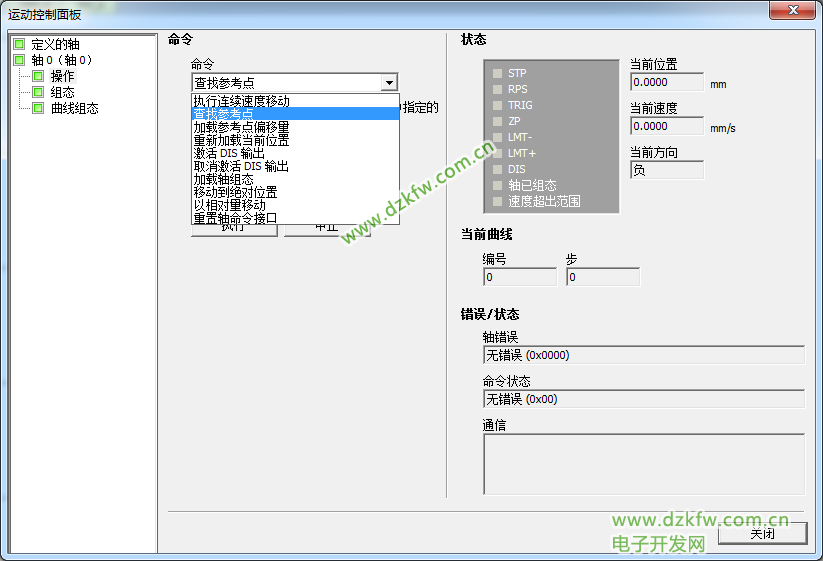
第三步:(STEP 7-MicroWIN SMART编程软件―左上角菜单栏―工具―运动控制面板)

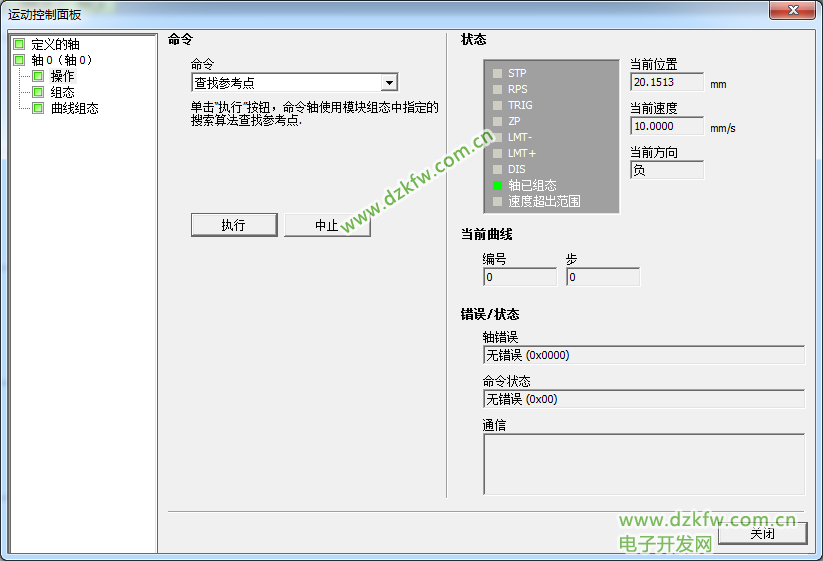
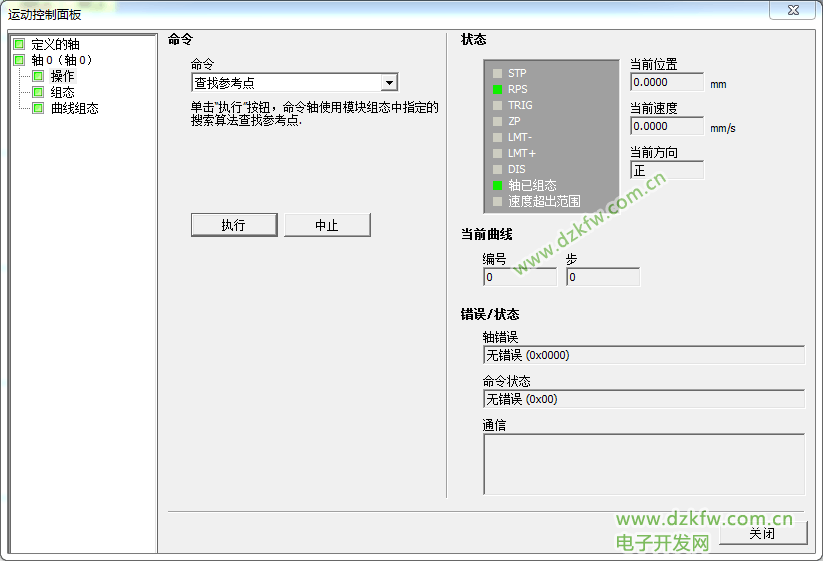
第四步:(开始我们可以选择查找参考点,也就是回原点)
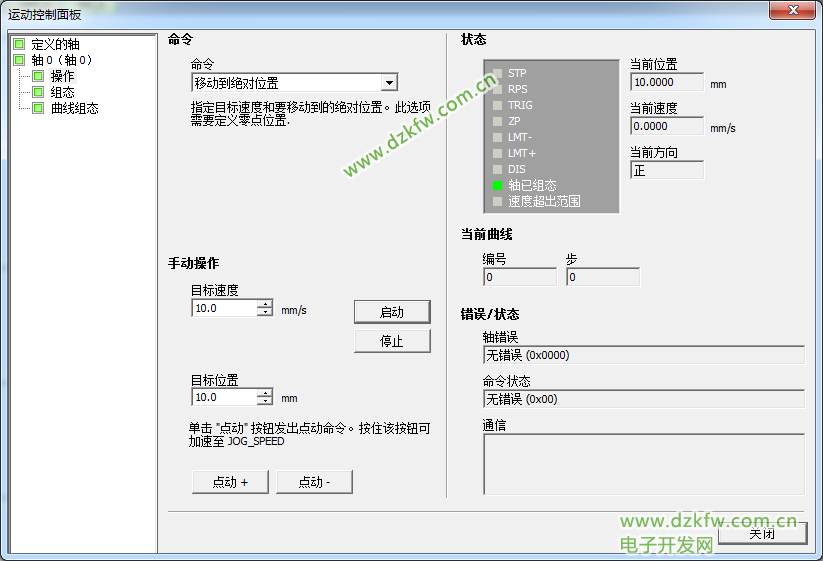
第五步:(绝对位置移动)
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底