
一、构件:独立运动的单元体。
二、运动副及分类:
1、运动副:机构由若干个相互连接接起来的构件组成。机构中两构件之间直接接触并能作相对运动的可动连接,称为运动副。
2、运动副元素:两构件上构成运动副的接触表面。
三、运动副的分类:
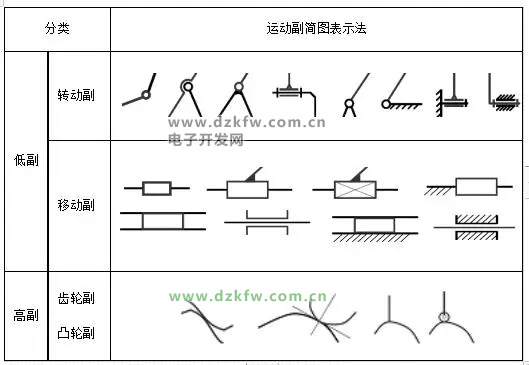
在平面运动副中,两构件之间的直接接触有三种情况:点接触、线接触和面接触。按照接触特性,通常把运动副分为低副和高副两类。
1、低副:
两构件通过面接触构成的运动副称为低副。根据两构件间的相对运动形式,低副又分为移动副和转动副。两构件间的相对运动为直线运动的,称为移动副;两构件间的相对运动为转动的,称为转动副或称为铰链副。
2、高副:
两构件通过点或线接触构成的运动副称为高副。凸轮1与尖顶推杆2构成高副,两齿轮轮齿啮合处也构成高副。
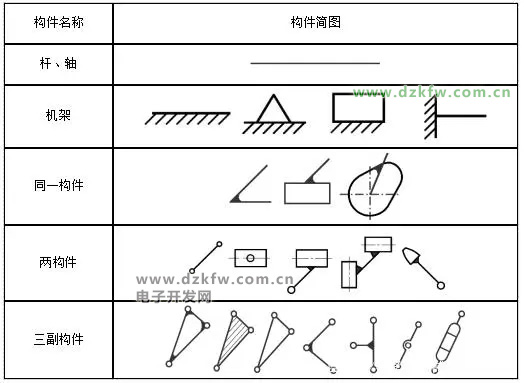
四、机构:具有确定相对运动的运动链。机构中的构件可分为三类:
1、固定件或机架:用来支撑活动构件的构件。研究机构中活动构件的运动时,常以固定件作为参考坐标系。
2、原动件:运动规律已知的活动构件。它的运动是由外界输入的,故又称为输入构件。
3、从动件:机构中随着原动件的运动而运动的其余活动构件。其中输出机构为预期运动的从动件称为输出构件,其他从动件则起传递运动的作用。
五、平面机构运动简图:在研究机构运动时,为了突出与运动有关的因素,将那些无关的因素删减掉,保留与运动有关的外形,用规定的符号来代表构件和运动副,并按一定的比例表示各种运动副的相对位置。这种表示机构各构件之间相对运动的简化图形,称为平面机构运动简图。
设计注意:
因为低副约束多,运动稳定,结构上更耐用,所以在设计的时候多使用低副
主要原理:可以把低副看做多个或者无数个高副的组合(把面分解成线和点)
具体选型需要根据实际情况进行
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底