
引言:什么是自由度,自由度在各个学科中有着不同的含义,若是依据机械原理的话,其含义为机构的位置得以确定时必须给出独立运动参数的数目,这也被称之为机构自由度。本文主要介绍机械臂自由度的含义,以及机械臂自由度的计算方式。
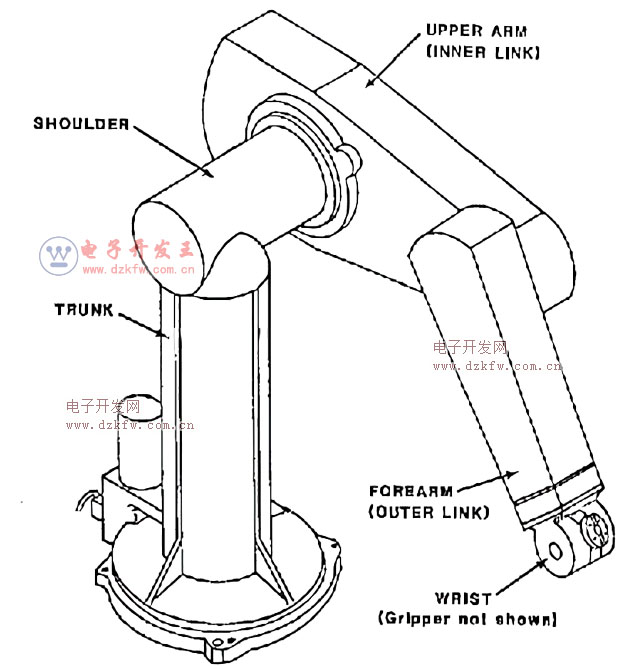
机械臂类似于人的手臂,是一种多自由度机器人,由多个驱动关节通过机械臂本身的机械结构逐个连接而成,其末端可以实现空间的多自由度运动。在末端安装机械手、吸盘、焊枪、喷嘴等执行器,就可以代替人们进行部分高强度、高危的重复工作。
机械臂的自由度通常有六个自由度,一般专用的机械臂只有两个到四个自由度,而通用机械臂则大多数为三个到六个自由度。机械臂自由度越高,其机构所执行的动作也就越复杂。下面先为大家简单介绍一下机械臂自由度的含义。
机械臂自由度
机械臂自由度的含义
机械臂上能够独立运动的关节数目,被称之为机械臂的运动自由度。工业机器人采取的控制方法就是把机械臂上的每一个关节都当成一个单独的伺服机构,并且每个轴都对应着一个伺服器,每一个伺服器都是通过总线来进行控制,由控制器进行统一控制并协调工作。
在设计工业机器人时一般会采用六个自由度,分别为沿x轴、y轴、z轴平移;绕x轴、y轴、z轴旋转,前面三个自由度是用于确定位置,后面三个自由度则是用于确定姿态,以实现对机械臂的控制。一个基准面与物体底面重合,限制了物体沿z轴平移,绕x轴旋转,绕y轴旋转三个自由度;二个基准面又与物体后侧面重合,限制了物体沿x轴平移,绕z轴旋转二个自由度;三个基准面与物体另一个侧面重合,限制了物体沿y轴平移一个自由度。
若根据机械臂不同的结构形式可分为水平多关节机械臂和直角坐标系机械臂等。水平多关节机械臂一般会有Z1轴旋转、Z2轴旋转、Z轴平移这三个主自由度,通过在执行末端加装X轴旋转和Y轴旋转就可以到达空间内任何一个坐标点。直角坐标系机械臂一般由X轴平移,Y轴平移,Z轴平移这三个主自由度组成,通过在执行末端加装X轴旋转、Y轴旋转和Z轴旋转就可以到达空间内任何一个坐标点。
机械臂自由度的计算方式
机械臂自由度的计算是在设计机械臂时的先决条件,通过计算机械臂的自由度,就可以得知机械臂可能产生的运动方式,如若是机械臂的关节只需要上下移动,则必须限制关节绕X轴、Y轴、Z轴的转动,以及沿X轴、Y轴方向的移动。机械臂的自由度可分为平面自由度和空间自由度,可利用简单的计算方式计算出它们的自由度。

机械臂自由度
平面自由度的计算方式。假如机械臂所有的关节为k,减去固定构件(机座),则机械臂运动的关节数量为n=k-1。在没有用运动副连接前,这些关节的自由度总数为3n。当运动副将这些关节连接起来组成机械臂之后,机械臂中各个关节具有的自由度就减少了,若机械臂中的低副数有PL个,高副数有PH个,而机械臂中全部的运动副所引入的约束总数有2PL+PH。所以,关节自由度的总数减去运动副所引入的约束总数等于该机械臂的自由度,即F=3n-2PL-PH就是计算平面自由度的方式。
空间自由度的计算方式。首先,我们需要知道机械臂在空间是具有六个自由度的,不同于在平面具有的三个自由度。它们的计算方式基本相同,都是关节自由度的总数减去运动副引入的约束总数等于该机械臂的自由度,计算方式:F=6n-5P5-4P4-3P3-2P2-P1。F表示机械臂的自由度,6n表示关节自由度的总数,P1、P2、P3、P4、P5分别表示1-5级运动副的个数。
浏览以上文章可以了解到机械臂自由度的含义以及计算方式,机械臂上能够独立运动的关节数目,就是机械臂的自由度。通常要在设计机械臂时,我们会使用到其自由度的计算方式,通过计算方式来得知机械臂可能产生的运动方式。关注我们,了解更多有关机械臂自由度的知识与应用。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底