
关键字:S7-200 SMART;Modbus TCP;MATLAB。
系列文章目录
基于S7-200 SMART实现一键启停
顺序功能图――(二)设计机组延时关机程序
基于S7-200 SMART实现Modbus TCP通信
前言
提到PID控制,不知道各位第一个想到的相关实现软件是什么,反正博主第一个想到的是MATLAB,不过这都是因为在过去的学生时代接触这个最多。相信基于PID的控制理念,不论是C++/C#还是Python基于这些高级语言很多软件都能实现PID控制。不过在工作以后在过程控制或是运动控制PLC的使用十分广泛,一些PLC也集成了PID控制的功能例如S7-200 SMART。
随着时代的发展越来越多不同的PID控制也被运用到工程中――模糊PID控制、专家PID控制、神经网络PID控制和差分进化PID控制,他们是智能控制中专家控制、模糊控制、神经网络控制、优化算法控制的发展的结果,虽然优势明显,但仅凭PLC难以实现,往往需要PC中的其他软件进行辅助。因此实现PC软件如MATLAB与PLC之间的通信就是十分必要的。
一、Modbus TCP
Modbus TCP是一种通信协议,支持这种通信协议的设备只需要通过以太网就可以实现通数据传输,基于此通信协议,可以通过一根网线实现PC与PLC之间的数据处理,本文不会对Modbus TCP做重点介绍,需要学习的小伙伴可以走传送门――带你玩转modbusTCP通信。
二、总体环境介绍
以下的案例基于:
- PC操作系统:WIN11
- PLC:S7-200 SAMRT CPU ST60
- 通信介质:普通网线一根
- PLC编程软件:STEP 7-Micro/WIN SMART V2.8
- MATLAB:R2019a
三、PLC中搭建服务端
在基于S7-200 SMART实现Modbu TCP通信一文中博主详细介绍了基于S7-200 SMART搭建Modbus TCP服务端的搭建过程,这里只进行简单介绍,需要重温的小伙伴请走传送门。
设置端口号:502,保持寄存器包括从VB10000开始向后的1000个V寄存器。
四、Matlab中搭建客户端
在Matlab中已经集成好了Modbus通信需要的各种功能,这点十分方便,我们可以使用封装好的函数:
clc
clear all;
%创建modbus连接对象
mb = modbus('tcpip','192.168.2.1',502);
%通信延时2s
mb.Timeout = 2;
for i=1:1:1000
%读取数据
data = read(mb,'holdingregs',1,10,'int16');
%写入数据
write(mb,'holdingregs',1,[data(1)+1 data(2)+1 data(3)+1 data(4)+1 data(5)+1 data(6)+1],'int16');
%表示暂停0.1s
pause(1/10);
end
%断开并清除modbus对象
clear mb
其中
mb = modbus('tcpip','192.168.2.1',502);
用于生成一个Modbus对象,比较像面向对象编程中类的实例化。第一个参数表示是Modbus TCP通信,第二个参数表示服务端的IP地址(PLC的IP地址),第三个参数表示端口号。
mb.Timeout = 2;
用于设定Modbus对象的通信时间,超过此时间还未建立通信连接则认为通信失败。
data = read(mb,'holdingregs',1,10,'int16');
用于读取数据并反回到一个变量里。第一个参数表示是通过mb对象读取数据,第二个参数表示读取保持寄存器数据,第三个参数表示从第一个地址开始读取,第四个参数表示读取10个数据,第五个参数表示以int16类型的数据保存到data中。如果需要读取的数据有多种类型也可以写成如下形式:
data = read(mb,'holdingregs',1,[5,2,3],{
'int16','uint32','double'});
write(mb,'holdingregs',1,[data(1)+1 data(2)+1 data(3)+1 data(4)+1 data(5)+1 data(6)+1],'int16');
用于写入数据。第一个参数表示是通过mb对象写入数据,第二个参数表示写入保持寄存器数据,第三个参数表示从第一个地址开始写入,第四个参数表示写入的六个数据,第五个参数表示以int16类型的数据保写入。
clear mb
用于清除Modbus对象。
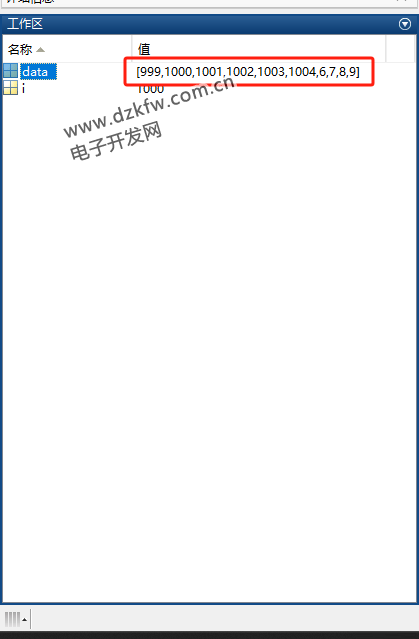
五、运行结果
可以看到运行结束后再PLC的V寄存器中VW10000~VW10010都比原来的值累加了1000,而且再MATLAB的工作区也得到了反应,值得一提的是,MATLAB的工作区不会实时更新数据,只有在程序运行完成后可以查看到运行的结果。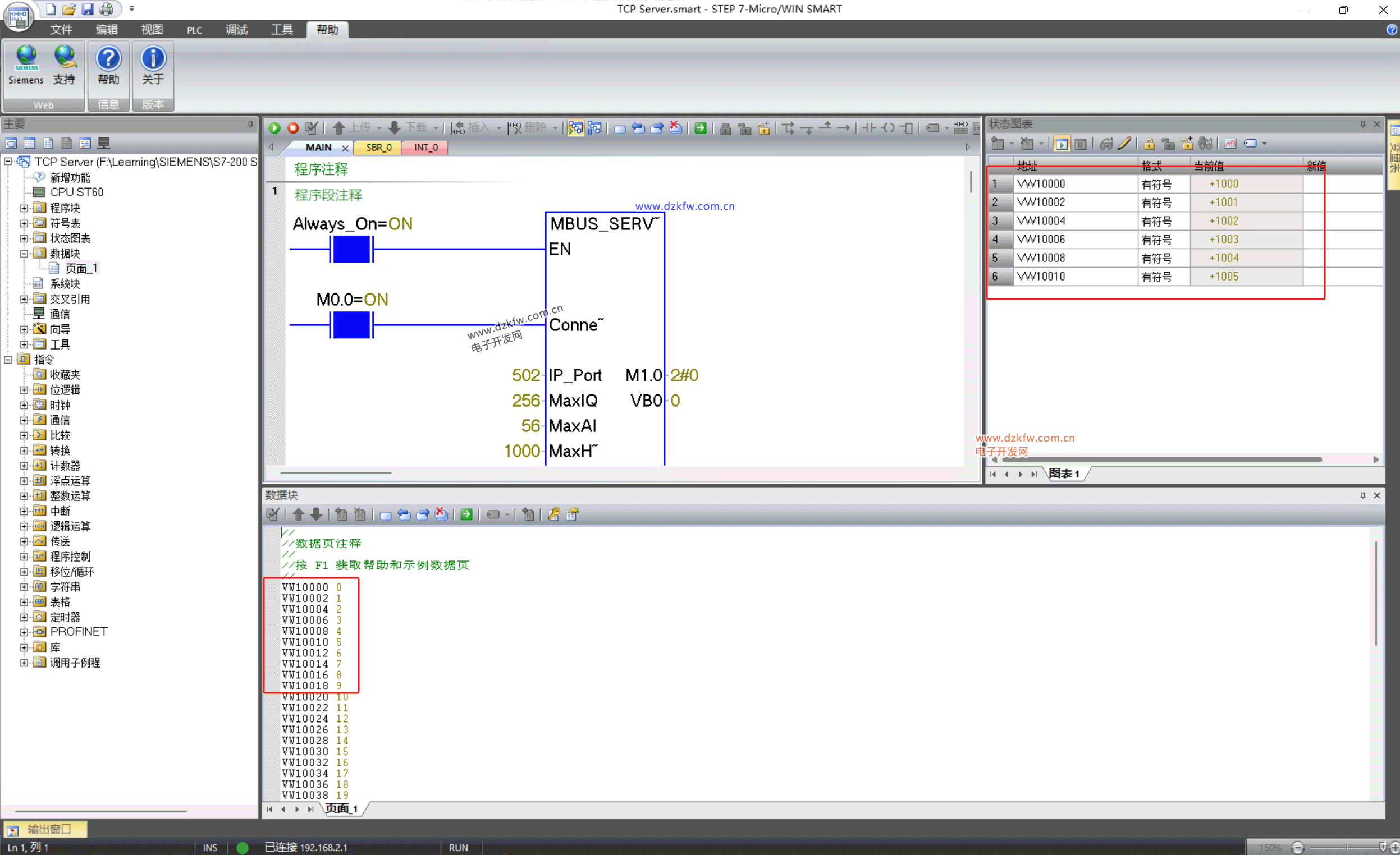
总结
本文实现了S7-200 SMART与PC端Matlab的Modbus TCP通信,通过Matlab读取与写入了V区寄存器。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底