
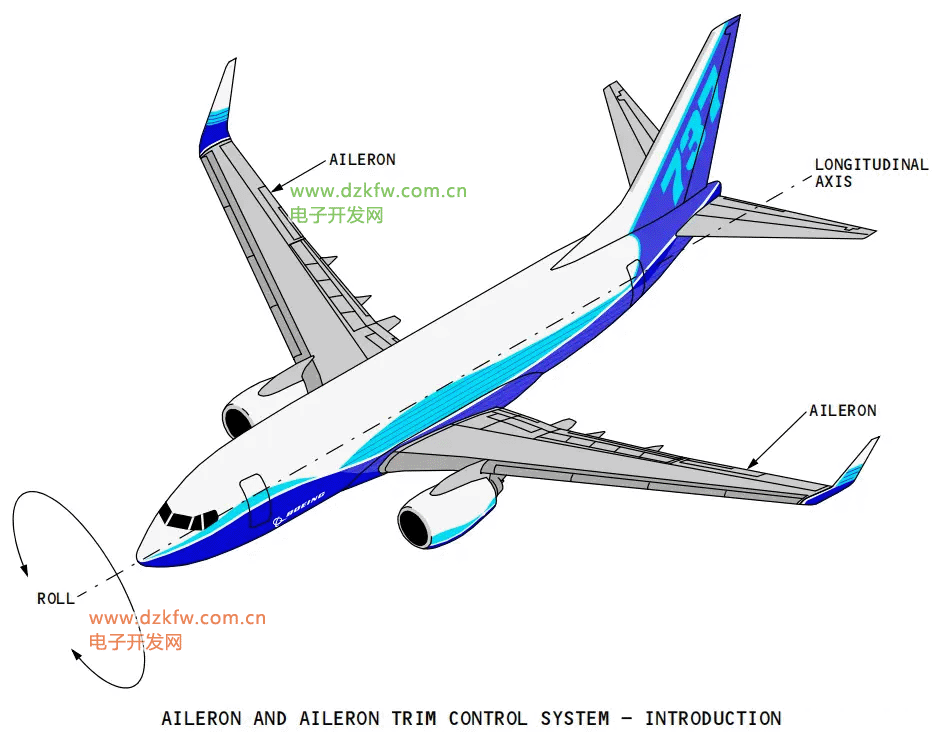
副翼控制飞机绕纵轴的飞行姿态。位于机翼外侧后缘。在滚转控制时,一侧机翼的副翼向上移动,另一侧机翼的副翼向下移动。
飞行员转动驾驶盘手动控制滚转。当自动驾驶启动时,会自动控制副翼。在自动驾驶操作过程中,作动筒给予反馈输入以作动驾驶盘。飞行扰流板也提供滚转控制。
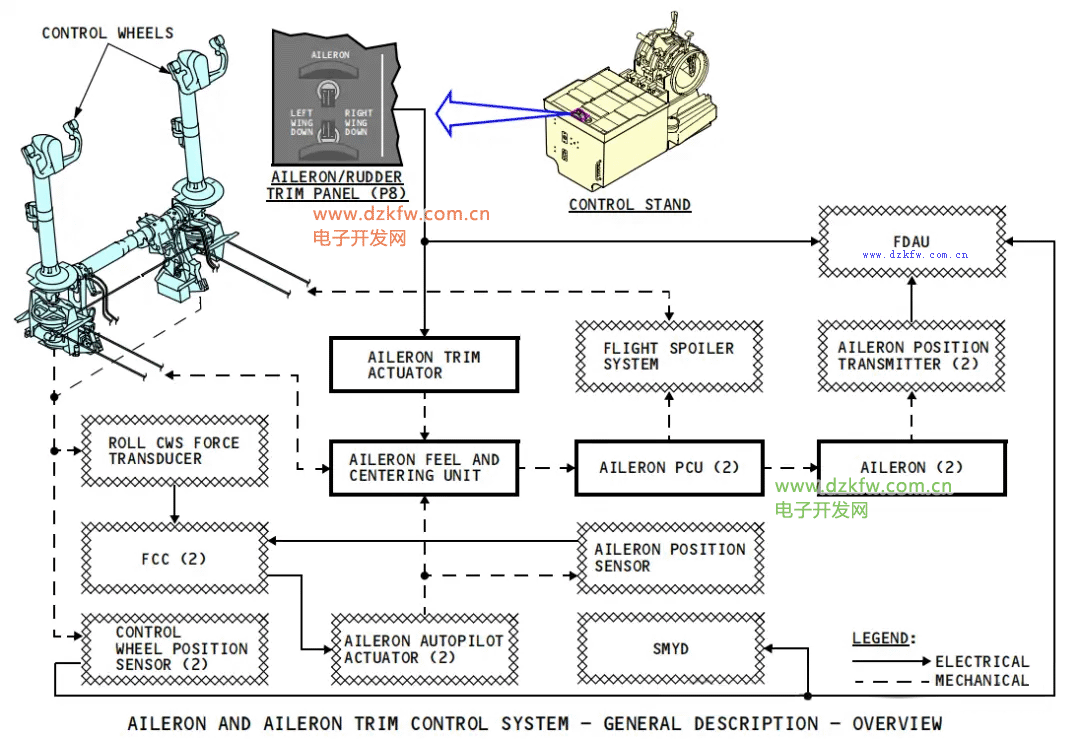
飞行员使用两个驾驶盘来控制飞机的滚转姿态。副驾驶一侧的传动装置在驾驶盘之间提供机械连接。如果一个驾驶盘不能作动,另一个可以继续控制。
驾驶盘通过钢索和连杆向PCU提供机械输入。液压进入PCU,使外壳移动。副翼PCU运动通过机翼钢索和扇形盘机械地移动副翼。
当驾驶盘移动时,它也给滚转驾驶盘操纵(CWS)力传感器和驾驶盘位置传感器一个机械输入。滚转CWS力传感器向飞行控制计算机(FCCs)发送与驾驶盘转向力成比例的信号。驾驶盘位置传感器向失速管理偏航阻尼器(SMYD)和飞行数据采集组件(FDAU)发送信号以获取驾驶盘位置。
在人工反转时,驾驶盘通过钢索和连杆向PCU提供机械输入。PCU中的机械止挡使外壳移动。副翼PCU运动通过机翼钢索和扇形盘机械地作动副翼。
副翼配平电门和配平作动筒让机组人员平衡掉不必要的驾驶盘力。当飞行员移动副翼/方向舵配平面板上的副翼配平电门时,电门会向副翼配平作动筒和FDAU发送信号。配平作动筒移动感觉和定中组件。这个运动进入副翼PCU。副翼PCU运动通过机翼钢索机械地移动副翼和扇形盘。
在副翼配平期间,驾驶盘也随动,并在驾驶杆的顶部提供指示。
当FCC参与时,它们控制副翼自动驾驶作动筒。作动筒为感觉和定中组件以及副翼位置传感器提供机械输入。感觉和定中组件的运动进入副翼PCU,副翼位置传感器的信号进入FCC。副翼PCU运动通过机翼钢索和扇形盘移动副翼。该扇形盘还为副翼位置传感器提供机械输入。传感器向SMYD和FDAU发送位置信号。飞扰也能提供滚转控制。当副翼PCU作动,会给飞扰系统提供输入。
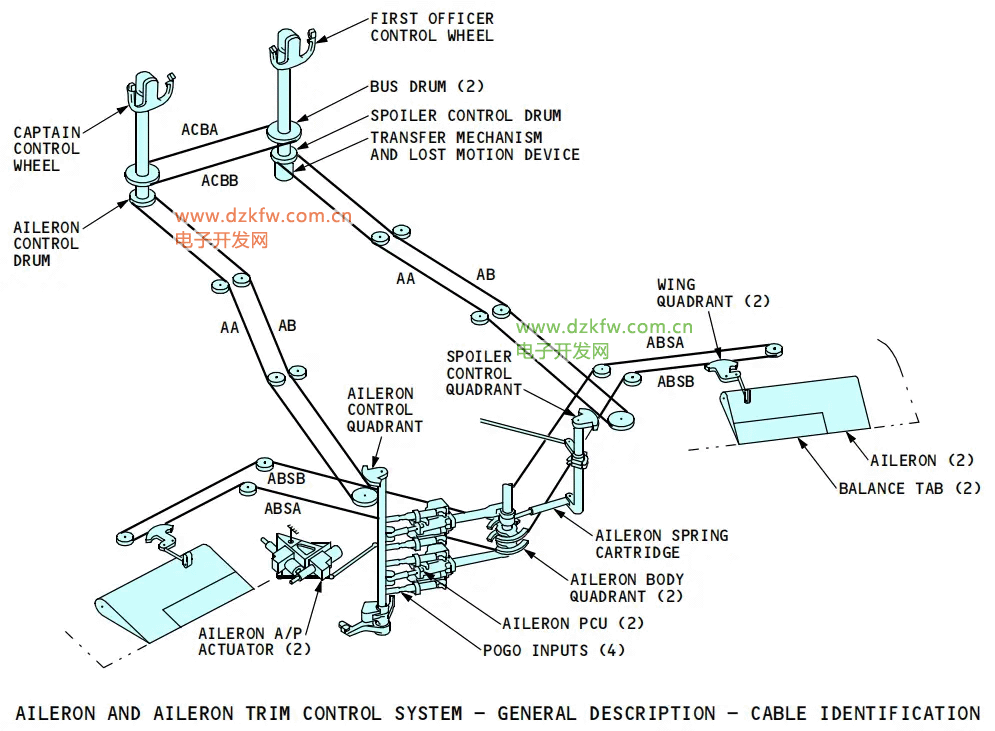
副翼控制系统的部件:
- Aileron control wheels:副翼驾驶盘(2)
- Aileron control wheels drum:副翼驾驶盘鼓轮
- Aileron transfer mechanism and lost motion device:副翼转换机构和滞后机构
- ACBA and ACBB; bus drum cables:ACBA和ACBB,公共鼓轮钢索
- AA and AB, left and right body cables:AA和AB,左(机长CAPT)和右(副驾F/O)机身钢索
- ABSA and ABSB, left and right wing cables:ABSA和ABSB,左和右机翼钢索
- Aileron control quadrant:副翼控制扇形盘
- Aileron feel and centering unit:副翼感觉和定中组件
- Aileron trim actuator:副翼配平作动筒
- Aileron power control units:副翼动力控制组件PCU(2)
- Aileron body quadrants:副翼机身扇形盘(2)
- Aileron spring cartridge:副翼弹簧连杆
- Ailerons and wing quadrants:副翼及机翼扇形盘(2)
- Balance panels and tabs:平衡板(8)和调整片(2)
Control Wheels:
驾驶盘向副翼配平控制系统传送飞行员输入。CAPT驾驶盘的转动通过输入轴传递到驾驶盘鼓轮。F/O驾驶盘的转动通过输入轴传递到公共鼓轮和钢索(ACBA,ACBB),再到到CAPT公共鼓轮。当飞行员转动驾驶盘时,控制钢索移动。驾驶盘和转换机构中的机械止挡装置使驾驶盘的左右运动限制在107.5度。
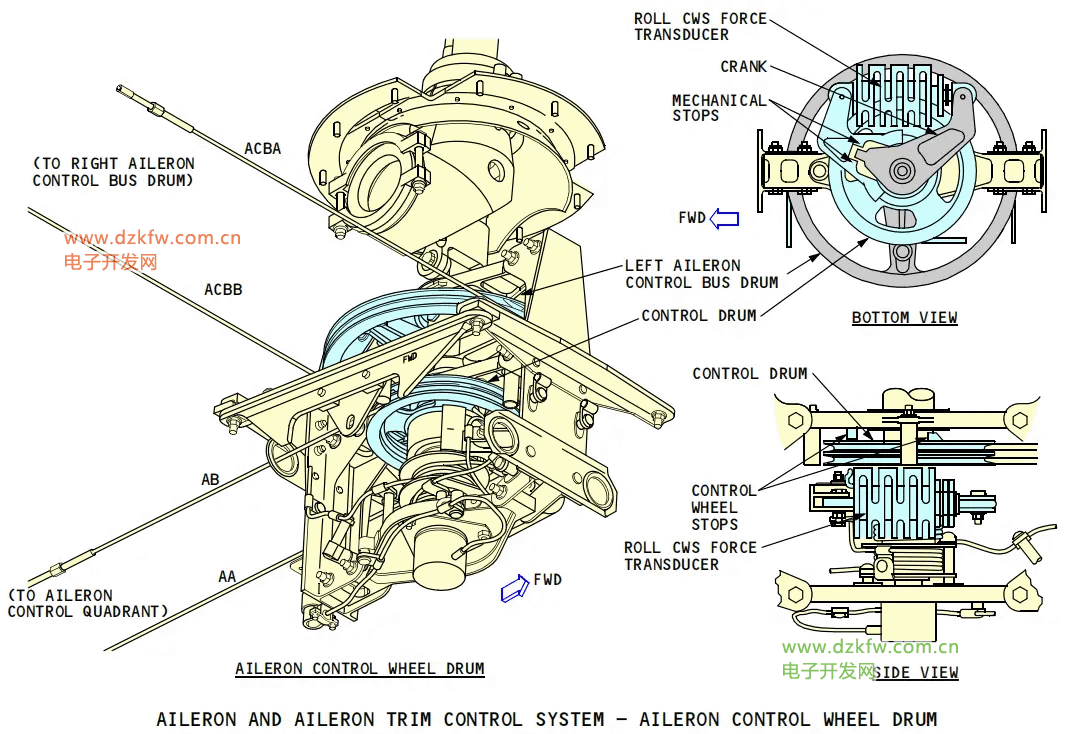
Control Wheel Drum:
来自CAPT和F/O驾驶盘的输入通过副翼驾驶盘鼓轮到副翼左机身钢索。
当飞行员转动驾驶盘时,轴转动曲柄。曲柄的运动通过滚转CWS力传感器到达控制鼓轮。如果滚转CWS力传感器连接有故障,机械止挡会提供保护。当控制鼓轮移动时,左机身钢索移动。驾驶盘的止挡,限制了控制鼓轮和驾驶盘的运动。滚转CWS力传感器将驾驶盘的转动力成比例的发送到飞行控制计算机(FCC)。
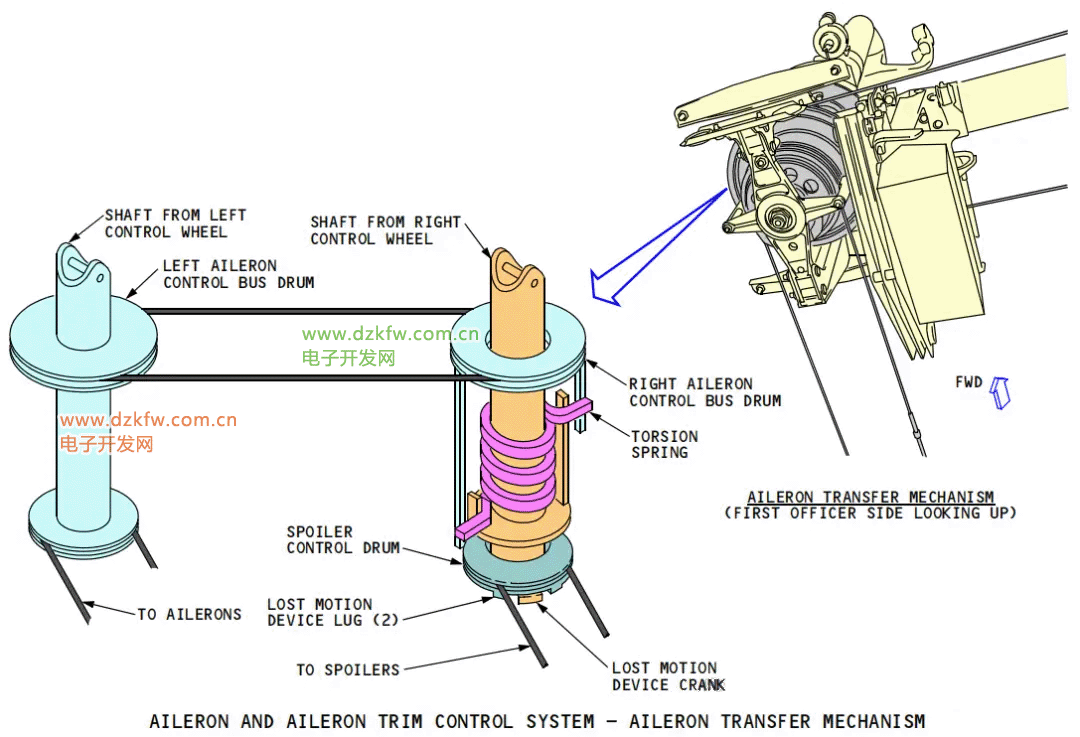
Aileron Transfer Mechanism and Lost Motion Device:
副翼转换机构有扭力钢索和滞后机构。在正常操作时,副翼转换机构将运动从F/O驾驶盘传递到公共鼓轮和钢索。如果发生卡阻,转换机构和副翼弹簧连杆将副翼系统与扰流板隔离。
正常工作时,扭力弹簧为滚转控制提供载荷。
左驾驶盘公共鼓轮的运动通过右副翼公共鼓轮到达扭力弹簧。扭力弹簧将运动传递给右驾驶盘和轴。轴的运动还带动滞后机构曲柄的运动。
右驾驶盘的运动通过轴到达扭力弹簧。扭力弹簧将运动传递给右副翼控制公共鼓轮。运动通过左副翼公共鼓轮到左驾驶盘和左机身钢索。
如果右驾驶盘卡阻无法转动,CAPT可以操作左驾驶盘,并克服扭力弹簧和感觉和定中组件的力,来操纵副翼完成滚转,而且此时只能操纵副翼,飞扰将失效。
如果左驾驶盘卡阻无法转动,F/O可以操作右驾驶盘,并克服扭力弹簧和弹簧连杆的力。滞后机构在驾驶盘转动12度的时候啮合,然后转动扰流板控制鼓轮并移动右机身钢索,来操纵飞扰完成滚转,而且此时只能操纵飞扰,副翼将失效。
Control Cables:
公共鼓轮钢索ACBA和ACBB将左右驾驶盘连接在一起。
左(CAPT)机身钢索AA和AB在正常操作期间提供从驾驶盘到副翼控制扇形盘的输入。
左右机翼钢索ABSA和ABSB将机身扇形盘的运动传递到机翼扇形盘,以作动副翼。
右(F/O)机身钢索AA和AB为转换机构和滞后装置提供随动。
Aileron Control Quadrant:
副翼控制扇形盘连接副翼输入轴。副翼控制扇形盘通过副翼输入轴将运动从左机身钢索传递到副翼感觉和定中组件以及副翼PCU。
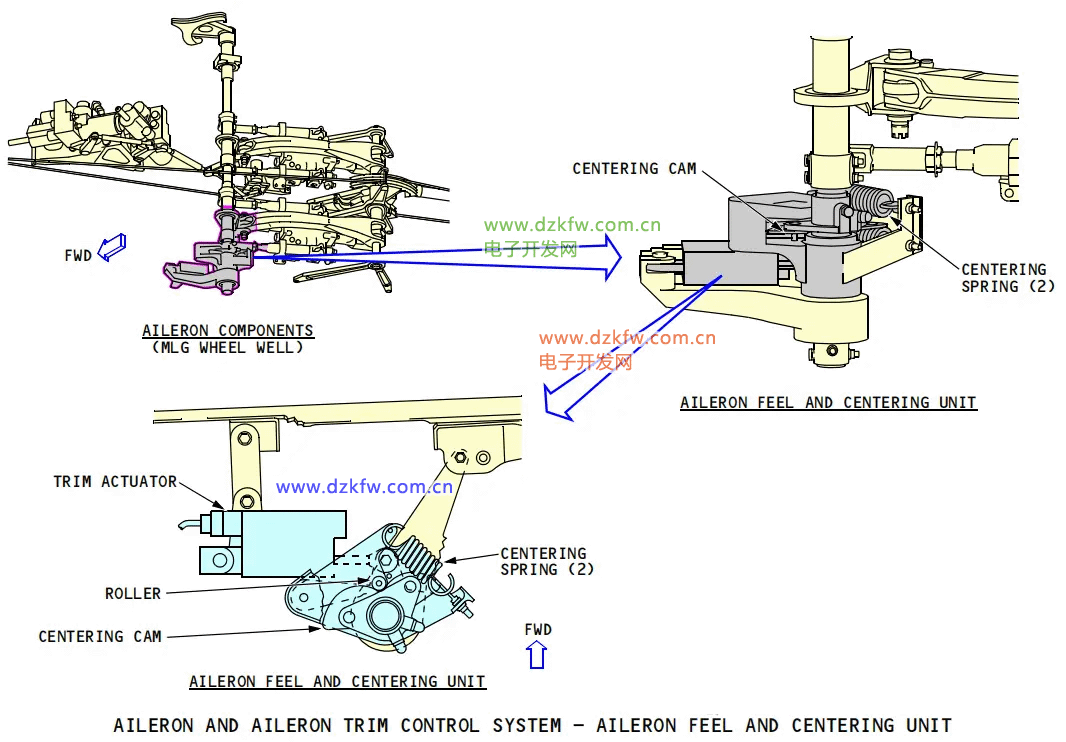
Aileron Feel and Centering Unit:
副翼感觉和定中组件在副翼输入轴的底部。定中弹簧将滚子固定在凸轮的中心。当驾驶盘移动时,凸轮随轴转动并使滚子在凸轮上向上移动。这拉伸了弹簧,并为飞行员提供了感觉力。
当飞行员松开驾驶盘时,弹簧力使滚子移动到凸轮的中心。系统回到了中立配平位。
在配平期间,副翼配平作动筒将滚子向上移动到凸轮上。弹簧使凸轮保持在中心,并使扇形盘和输入轴运动。这给副翼PCU一个输入来作动副翼。这会转动驾驶盘并在驾驶盘的顶部指示配平量。
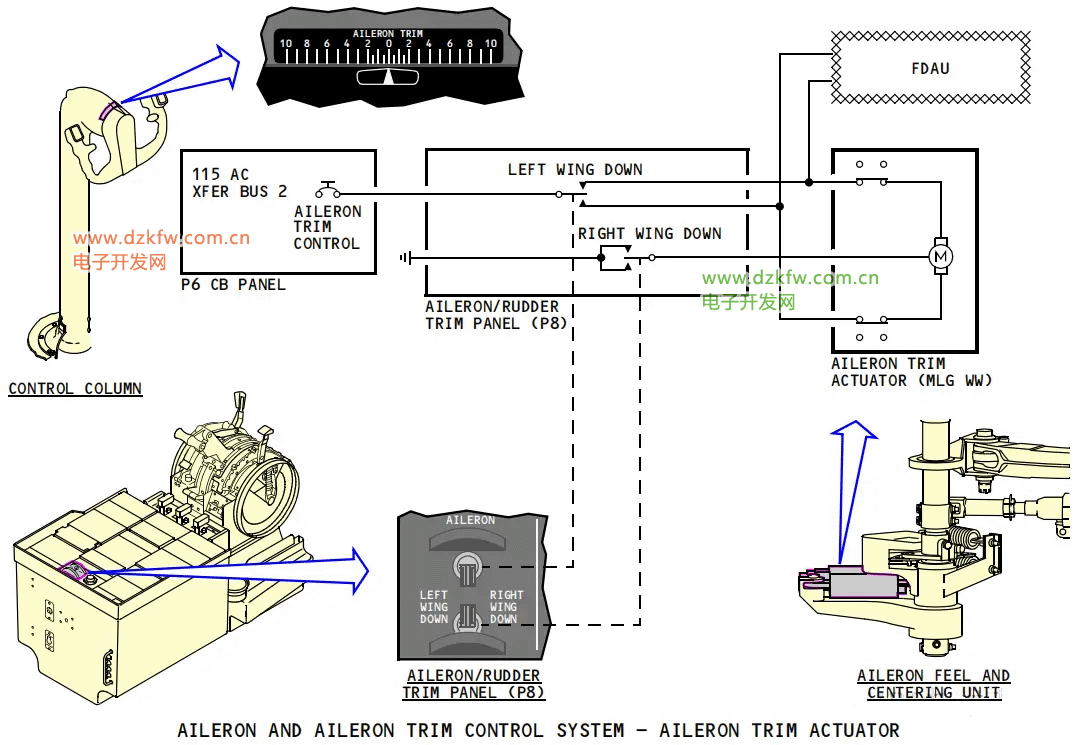
Aileron Trim Actuator:
副翼配平作动筒在感觉和定中组件内。在电配平过程中,飞行员同时用两个电门控制配平作动筒控制副翼的配平。当有电时,副翼配平作动筒可以随时操作。前部的电门控制副翼配平方向并向飞行数据采集组件(FDAU)发送信号。后部的电门为电马达提供接地。必须同时操作两个电门,才能操作配平作动筒。配平作动筒移动副翼感觉和定中组件,移动副翼输入轴和副翼PCU,并反向驱动驾驶盘。副翼配平指示牌显示配平量。驾驶盘转动6度为一个单位。最大配平量为9.5个单位(57度)。配平时必需要有液压压力才能操纵副翼。
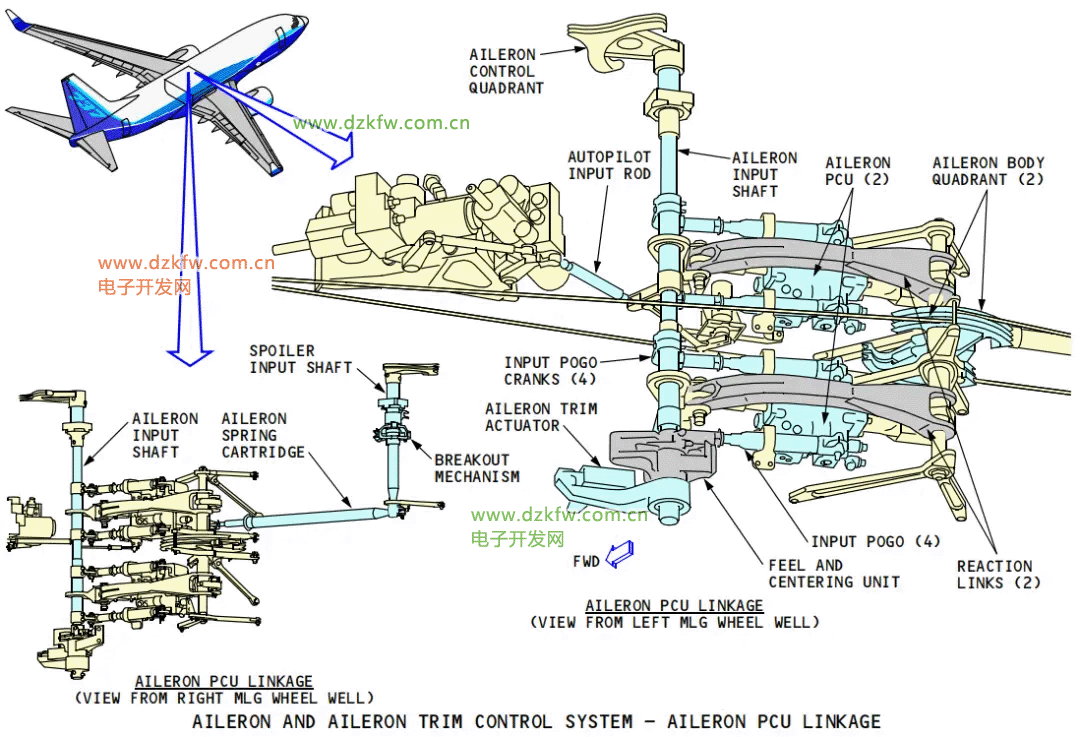
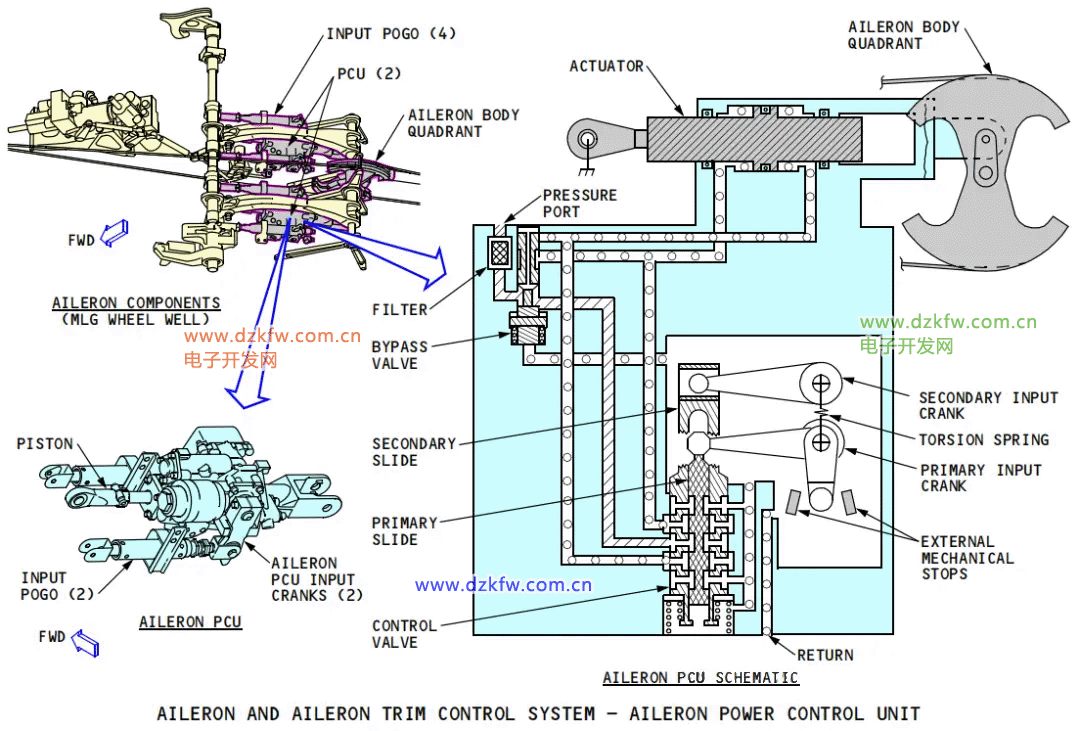
Aileron PCU Linkage:
PCU联动装置有以下部件:控制扇形盘、输入轴、自动驾驶输入杆、感觉和定中组件、配平作动筒、输入pogo曲柄(4)、输入pogo杆 (4)、承力连杆(2)。
当输入轴转动时,会作动输入pogo曲柄,作动pogp杆来控制副翼PCU。两个副翼PCU杆端固定,外壳移动副翼机身扇形盘。
Aileron Power Control Unit:
PCU用于提供液压作动副翼。
正常操作:在正常操作期间,副翼的输入通过每个PCU的POGO杆到输入曲柄。上、下输入曲柄移动控制活门中的滑阀并向作动筒提供液压。下输入曲柄连接至主级滑阀,上输入曲柄连接至次级滑阀。PCU中的扭力弹簧连接两个输入曲柄。主级滑阀的运动提供了总流量的一半,次级滑阀的运动提供了另一半。在次级曲柄开始移动次级滑阀之前,主级滑阀移动到其全部有效行程。当主滑阀和副滑阀移动时,液压通过控制活门到达作动筒的一侧。这将作动筒外壳和副翼机身扇形盘移动到命令位置。作动筒的另一侧连接回油。
系统压力失效:如果一个PCU失去液压,则其旁通活门移至旁通位,连接作动筒的两侧,并防止液锁。当飞行员移动驾驶盘时,ON侧PCU仍然正常移动到其命令位置。当ON侧PCU移动时,它也移动其各自的副翼机身扇形盘,并反向驱动OFF侧PCU作动筒外壳。当OFF侧外壳移动时,液压油通过旁通活门从作动筒的一侧推到另一侧。
卡阻:如果一个PCU输入的POGO杆不能自由移动,飞行员必须提供20磅的额外力量来压缩或延长POGO杆内的弹簧。另一个PCUPOGO杆仍然移动其输入曲柄和滑阀到命令位置。这平衡了作动筒两侧的压力,防止了液锁。现在另一个PCU可以正常移动副翼机身扇形盘组件。当ON侧PCU移动副翼机身扇形盘时,它也会反向驱动OFF侧PCU作动筒外壳。当OFF侧壳体移动时,液压油通过旁通活门从一侧推到另一侧。
人工控制:在人工控制过程中,旁通活门没有收到液压并移动到旁通位,这连接了作动筒的两侧,并防止液锁。当驾驶员将驾驶盘移动超过三度时,主、次输入曲柄撞击作动筒外壳外部的机械止挡。当外壳移动时,作动筒中的液压流体通过旁通活门从一侧推到另一侧。壳体的运动还将副翼机身扇形盘组件移动到命令位置。
两个副翼PCU与升降舵PCU可互换。
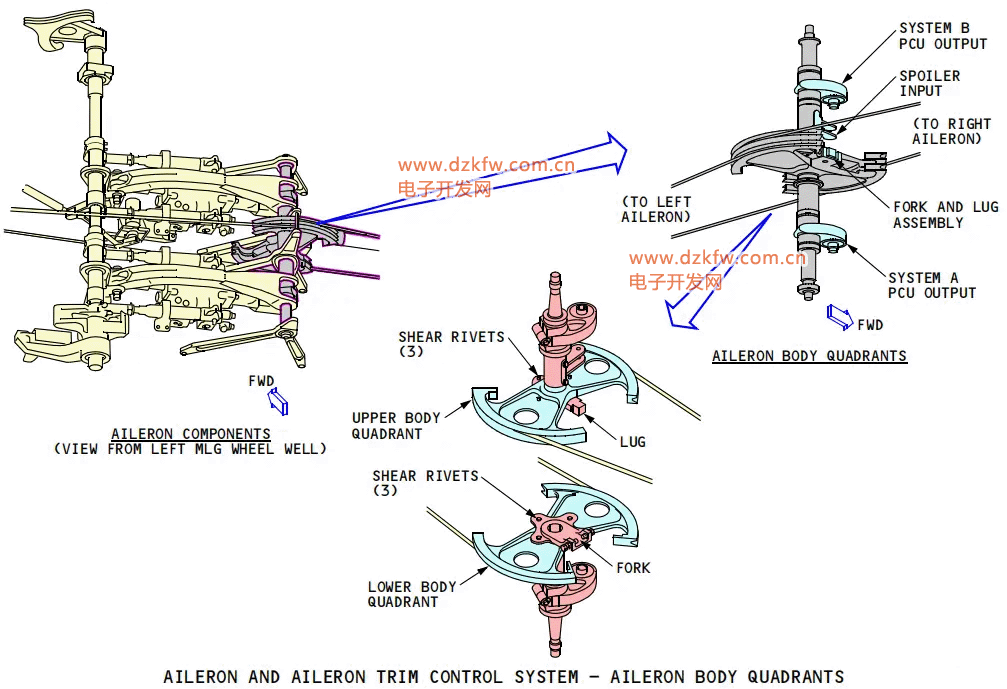
Aileron Body Quadrants:
副翼机身扇形盘位于主轮舱前壁板,他移动副翼左右机翼钢索和机翼扇形盘。副翼机身扇形盘的上部也移动副翼弹簧连杆。每个副翼机身扇形盘连接到一个曲轴。PCU外壳通过曲柄连接到相关的曲轴。三个剪切铆钉连接每个扇形盘和相关的输出轴。上扇形盘的钢索连接到右机翼扇形盘。下扇形盘的钢索连接到左机翼扇形盘。叉形和凸耳组件连接上下扇形盘。PCU外壳通过曲柄移动曲轴。这移动机身扇形盘和相关的副翼。如果一个液压系统关闭,另一个系统PCU通过叉形和凸耳组件移动两个扇形盘。如果一个机身扇形盘不能移动,则相关系统PCU移动其曲轴并剪切三个剪切铆钉。现在PCU和曲轴仍然可以移动,但副翼的输入只能来自另一个机身扇形盘。
Aileron Spring Cartridge:
在正常操作期间,副翼弹簧连杆提供副翼系统到飞行扰流系统的输入。如果发生卡阻,副翼弹簧连杆和转换机构将副翼系统与扰流板隔离。
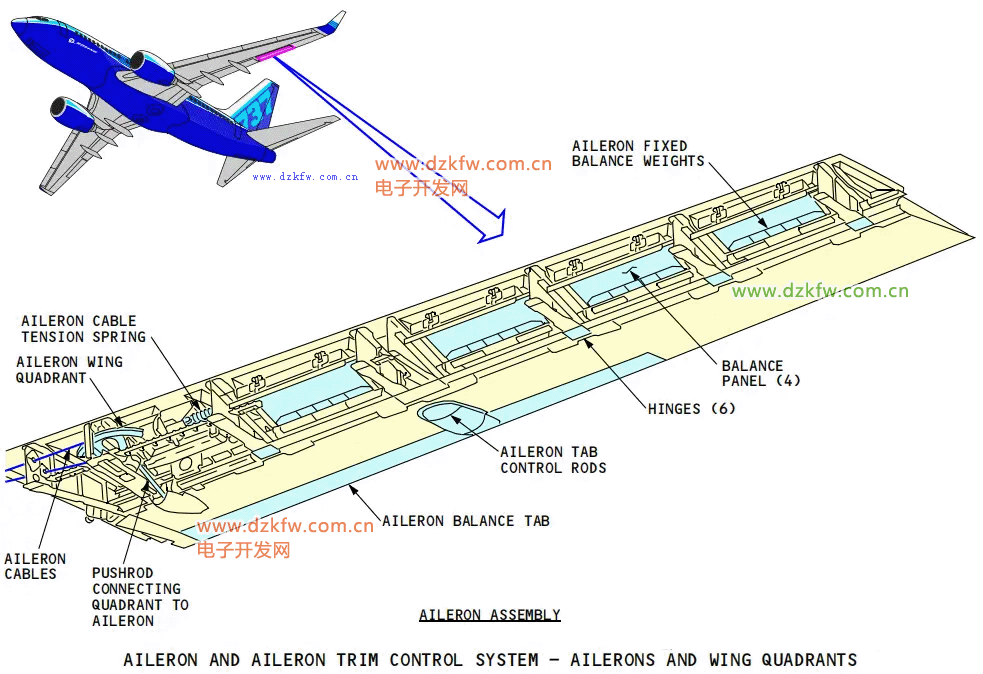
Ailerons and Wing Quadrants:
副翼机翼扇形盘将运动从副翼机身扇形盘和机翼钢索传送到副翼。当机翼钢索移动时,它会移动相关的机翼扇形盘和副翼。副翼调整片连杆从副翼运动中获得输入,并将调整片朝与副翼运动相反的方向移动。在另一侧机翼上的副翼和调整片的移动量相等,但方向相反。当驾驶盘居中时,副翼向下倾斜1度。行程范围受到副翼PCU行程的限制。副翼可以向上移动20度,向下移动15度(或依据构型,向上19度向下16度)。
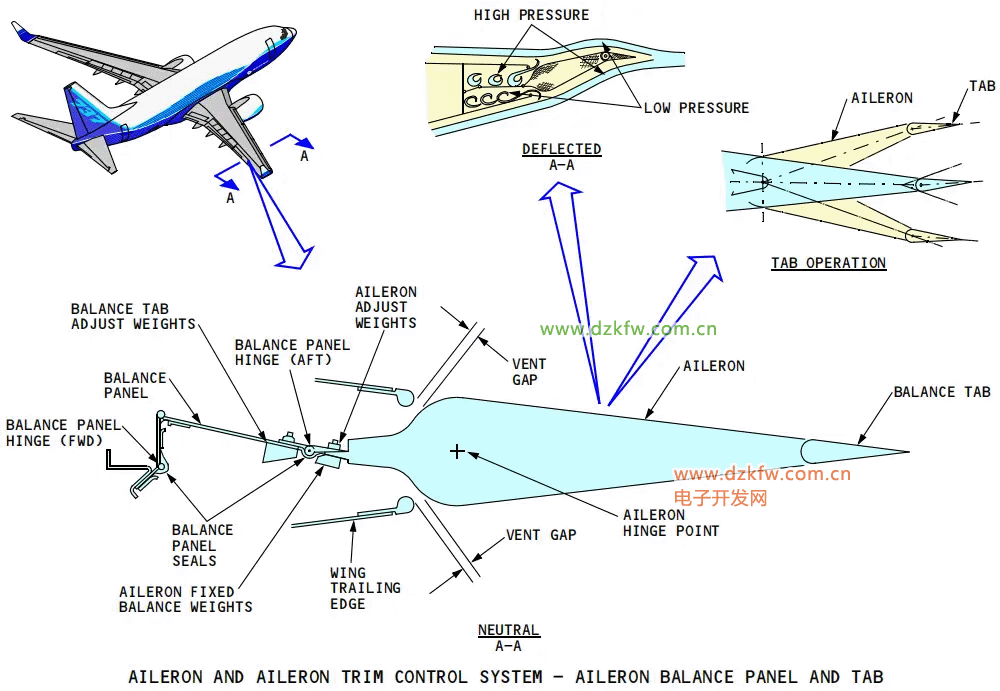
Balance Panels and Tabs:
副翼平衡板(Balance Panel)和调整片(Balance Tab)使用空气动力来帮助减少飞行中移动副翼所需的力。平衡板在第一到第四副翼舱内。平衡板的前缘通过铰链连接到机翼结构上,后缘连接在副翼上。封严沿着平衡板的两侧连接铰链组件,这就形成了两个独立的腔室,上腔和下腔。当没有输入时,压力会在平衡板上产生,并使副翼保持在中立位置。当操纵副翼时,副翼上下表面之间存在一个递增的压差。这些压力被排入平衡舱,并在平衡板上提供一个力,帮助副翼运动。当调整片移动时,副翼尾部会产生力的差值,这会帮助驱动副翼。这些力一直存在,但在人工控制时最有用。
如下图A-A,当控制副翼向上偏转时:
平衡舱上腔压力>下腔压力,压力差作用在平衡板上,在副翼前缘形成向下的力,帮助副翼向上偏转;
调整片上部压力<下部压力,压力差作用在调整片上,在副翼后缘形成向上的力,帮助副翼向上偏转。
副翼平衡板和调整片一起使用,一个作用在副翼前缘一个作用在后缘,他们产生的空气动力对副翼舵面形成的力矩都是帮助副翼偏转的。
功能描述:
正常控制
当驾驶盘移动时,左机身钢索移动并控制PCU。PCU外壳移动并控制副翼机翼钢索。
当PCU外壳移动时,还控制右机身钢索并完成到右驾驶杆的环路,也通过扰流板混合器控制扰流板机翼钢索。也会在驾驶盘作动后,控制飞扰作动筒作动。
人工控制
人工控制与正常操作几乎相同,只有一点不同。在输入曲柄触碰到机械止挡之前,副翼PCU上有三度的驾驶盘运动。然后PCU外壳移动,但需要飞行员提供操作力。
一个驾驶盘不能移动
如果一个驾驶盘不能移动,相关的侧钢索也不会移动。
如果右驾驶盘不能移动,飞行员只能使用左驾驶盘正常作动副翼。
如果左驾驶盘不能移动,飞行员只能使用右驾驶盘。这将移动驾驶盘12度后作动右机身钢索。这控制飞扰作动筒在驾驶盘运动预定量后再作动。
一个副翼不能移动
如果一个副翼不能移动,机身扇形盘处的剪切铆钉将剪切并隔离该副翼。副翼控制系统的另一部分正常工作。
一个PCU输入不能移动
如果一个PCU POGO杆输入不能自由移动,那么它就会被压缩或伸长。另一个PCU POGO杆仍然移动到命令的位置。这使作动筒两侧的压力相等。这可以防止液锁PCU,并让另一个PCU通过副翼机身扇形盘移动副翼。
向右滚转输入时副翼系统的运作:
中立位:
当驾驶盘处于中间位置时,驾驶盘顶部的副翼配平指示器显示副翼配平的量。感觉和定中组件是平衡的。滚子停留在凸轮的底部,弹簧没有伸展。副翼PCU输入曲柄处于中立位,没有液压输入到PCU。
向右滚转控制输入:
要向右滚转,机长顺时针转动驾驶盘。这也将在滞后机构的限制内移动副驾侧的公共鼓轮。副翼控制钢索移动滚轮,使其在感觉和定中组件的凸轮上向上滚动。弹簧伸展并抵抗输入力以提供感觉力。钢索带动输入杆,移动了副翼PCU的输入曲柄。此时液压进入PCU。
控制输入完成:
液压推动PCU外壳向左移动。这将使副翼机身扇形盘逆时针转动。机翼钢索张力使副翼移动。当副翼PCU外壳移动时,也会导致副翼弹簧连杆向左移动,再带动扰流板输入杆和右机身钢索。这使滞后机构处于转换机构的中间。当扰流板输入杆移动时,它给扰流板混合器一个输入来控制飞行扰流板的位置。
手动操作:
如果液压关闭,控制顺序与上述相同。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底