
在PLC对各种工业、物流等生产流水线的控制中,常见的环节是对步进电动机的控制。步进电动机是一种用电脉冲进行控制、将电脉冲信号转换为相应角位移或线位移的开环控制元件。正常情况下,电动机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,不受负载变化的影响,当步进电动机的驱动器接收到一个脉冲信号时,驱动电动机按照设定的方向旋转一个固定的角度,即步距角。电动机的旋转是以固定的角度逐步进行的,通过控制脉冲数量来控制角位移量,从而达到准确定位的目的。同时可以通过控制脉冲频率来控制电动机转动的速度和加速度,从而达到调速的目的。
就一个传动速比确定的具体设备而言,无需距离、速度信号反馈环,只需控制脉冲的数量和频率即可控制设备移动部件的移动距离和速度,而方向信号可控制移动的方向。另外,步进电机可以实现细分运转方式。因此,尽管步进电机的步距角受机械制造的限制不能很小,但可以通过电气控制的方式使步进电机的运转由原来的每个整步细分成多个小步来完成,提高了设备运行的精度和平稳性。
对于那些在运行过程中移动距离和速度均确定的具体设备,采用PLC通过驱动器来控制步进电动机的运转是一种理想的技术方案。本节以三相六拍步进电动机的控制为例,简要介绍S7 -200系列PLC在步进电动机控制中的应用。
一、步进电动机的工作原理
三相步进电动机的结构原理示意图如图7-32所示,当A相绕组通直流电流时,根据电磁学原理,便会在AA方向产生磁场,在电磁力的作用下,吸引转子,使转子的齿与定子AA磁极上的齿对齐。若A相断电、B相通电,这时新的磁场电磁力又吸引转子的两极与BB磁极齿对齐,转子沿顺时针转过60°。通常,步进电动机绕组的通断电状态每改变一次,转子转过的角度角α称为步距角。因此,图7-32所示步进电动机的步距角α等于60°。若控制线路不停地按A→B→C→A…的顺序控制步进电动机绕组的通断电,步进电动机的转子便不停地顺时针转动。若通电顺序改为A→C→B→A…,同理,步进电动机的转子将逆时针不停地转动。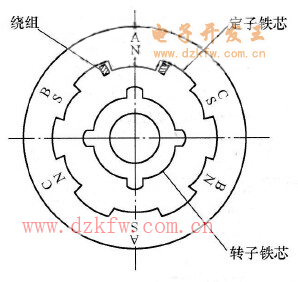
图7-32 三相步进电动机的结构原理图
若以三相六拍通电方式工作,当A相通电转为A相和B相同时通电时,转子的磁极将同时受到A相绕组产生的磁场和B相绕组产生的磁场的共同吸引,转子的磁极只好停在A相和B两相磁极之间,这时步距角α等于30°。当由A和B两相同时通电转为B相通电时,转子磁极再沿顺时针旋转30°,与B相磁极对齐。其余以此类推,所以采用三相六拍通电方式,可使步距角α缩小一半。
在本节中,主要讲述PLC对三相六拍步进电动机的控制。对三相六拍步进电动机的控制,主要有两个方面,三相绕组的接通与断开顺序以及对步进速度的控制,其控制要求如下:
(1)按下正向启动按钮,步进电动机按A→AB→B→BC→C→CA→A的时序正向转动。
(2)按下反向启动按钮,步进电动机按A→AC→C→CB→B→BA→A的时序反向转动。
(3)运行过程中,正/反转可不停地转换。
(4)步进速度慢速为0.5s,快速为0.05s,并可随时手动变速。
(5)每次启动均从A相启动。
二、步进电动机控制系统硬件设计
1.输入/输出信号分析
步进电动机PLC控制系统的硬件组成示意图如图7-33所示,由该组成示意图可知,步进电动机PLC控制系统的输入信号有:电动机正向、反向和停止按钮各1个,控制其运行速度的按钮1个,共有4路输入信号,需4个输入端子。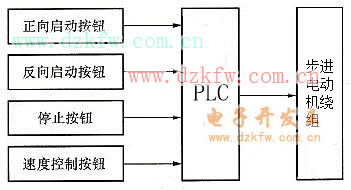
图7-33 步进电动机控制系统的硬件组成示意图
输出信号:控制电动机三相绕组旋转的3路信号,需3个输出端子。
2.PLC的输入/输出分配表
根据步进电动机的工作原理以及相应的控制要求,结合图7-33所示的硬件接线示意图,可知该步进电动机控制系统中有4个数字输入量和3个数字输出量,可设计如表7-5所示的三相六拍步进电动机PLC控制的输入输出分配表。
表7-5 相六拍步进电动机PLC控制的输入/输出分配表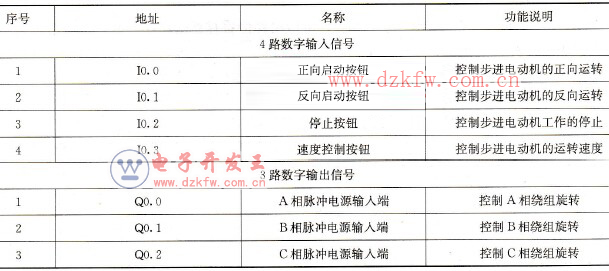
3.PLC的选型
根据表7-5中的输入/输出端子数,参考第2章表2-1 S7-200 CPU系列产品主要性能指标,本实例可以选用西门子公司S7-200系列PLC中的CPU221作为控制主机。
4.PLC的硬件接线图
根据PLC的输入/输出分配情况,结合图7-33所示的PLC控制系统硬件组成示意图,可以画出如图7-34所示的PLC主机的硬件接线图。
三、步进电动机控制系统软件设计
根据具体的控制要求,可以画出步进电动机控制系统的流程图,如图7-35所示。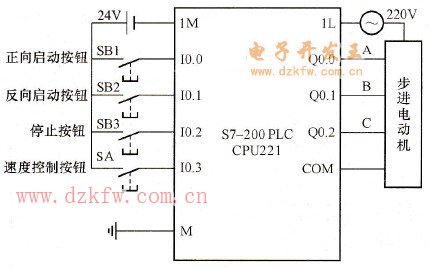
图7-34 步进电动机PLC主机的硬件接线图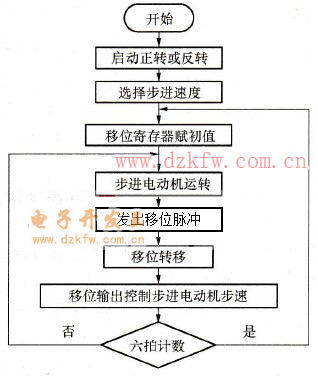
图7-35 步进电动机控制系统的流程图
在本例中,采用移位指令进行步进控制。首先指定移位寄存器MB0,按照三相六拍的步进顺序,移位寄存器每左移一位,电动机前进一个步距角,完成六拍后重新赋初值。移位寄存器的初值如表7-6所示。
表7-6 移位寄存器初值
其中,M0.6和M0.7始终为“0”,据此,可做出移位寄存器输出状态及步进电动机绕组的状态真值表,如表7-7所示。
表7-7 移位寄存器输出状态及步进电动机绕组的状态真值表

以正转为例对表7-7中数据进行解释。初始状态时,移位寄存器位M0.0~M0.5均为0,步进电动机三相绕组状态均为0。当第一个脉冲到达后,M0.0位为1,步进电动机转动一个步距角,A相绕组通电,即A相绕组状态为1,其余两相绕组状态仍为0。当第二个脉冲到达时,M0.1位为1,A相通电转为A相和B相同时通电,转子的磁极停在A和B两相磁极之间,所以此时A相和B相绕组状态均为1,C相绕组状态仍为0。当第三个脉冲到达时,M0.2位为1,步进电机再次转过一个步距角,此时B相绕组通电,B相绕组状态为1,A相和C相状态为0。当第四个脉冲到达时,M0.3位为1,步进电机再次转过一个步距角,此时B相和C相绕组通电,B、C相绕组状态为1,A相状态为0。当第5个脉冲到达时,M0.4位为1,步进电机再次转过一个步距角,C相绕组通电,C相状态为1,A、B相状态为0。当第六个脉冲到达时,M0.5位为1,A相和C相绕组同时通电,A相、C相状态为1,B相状态为0。至此步进电机完成一个周期的运转,当下一个脉冲达到时,步进电机重复上述的过程。反向运动时各相绕组的状态可进行类似的分析。
步进电动机控制系统的PLC程序的梯形图以及语句表如图7-36所示。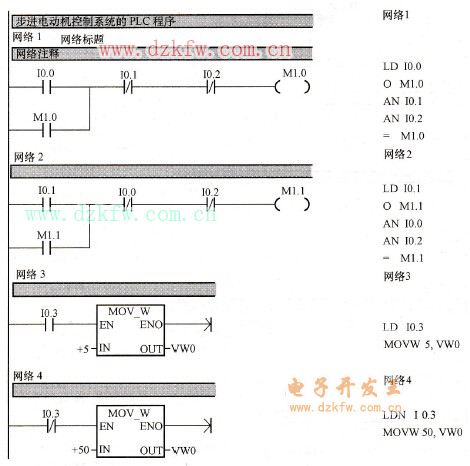
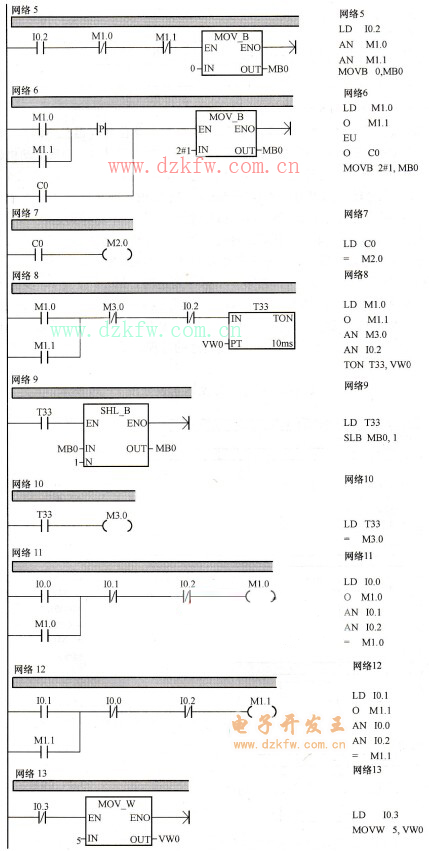
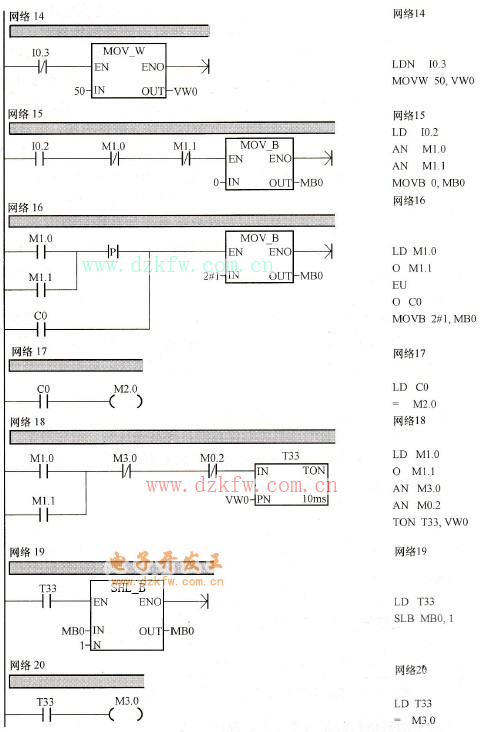
图7-36 步进电动机控制系统的PLC程序梯形图及语句表
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底