
вЛЁЂSTL/RET жИСю
STL жИСюПЩвдЪЙБрГЬепЩњГЩСїГЬКЭЙЄзїгыЫГађЙІФмЭМЗЧГЃНгНќЕФГЬађЁЃ
STL жИСюЕФвтвхЮЊМЄЛюФГИіВНЃЈМДзДЬЌЃЉЃЌдкЬнаЮЭМЩЯЬхЯжЮЊДгжїФИЯпЩЯв§ГіЕФзДЬЌНгЕуЁЃSTL жИСюгаНЈСЂзгФИЯпЕФЙІФмЃЌДгЖјЪЙИУзДЬЌЕФЫљгаВйзїОљдкзгФИЯпЩЯНјааЁЃ
ВННјЗЕЛижИСю RET ЪЧжИзДЬЌСїГЬНсЪјЃЌгУгкЗЕЛижїФИЯпЁЃ
вЛАу FX ЯЕСа plc ВЩгУзДЬЌЦї S БржЦЫГПиГЬађЃЌВЂгы STL жИСювЛЦ№ЪЙгУЁЃ
1. ЫГађЙІФмЭМКЭВННјЬнаЮЭМжЎМфЕФзЊЛЛ
ЪЙгУВННјЬнаЮжИСю STL КЭВННјЗЕЛижИСю RET ПЩвдНЋЫГађЙІФмЭМзЊЛЛЮЊВННјЬнаЮЭМЃЌЦфЖдгІЙиЯЕШчЯТЭМЫљЪОЁЃ

ЃЈ a ЃЉ ЫГађЙІФмЭМ ЃЈ b ЃЉ ЬнаЮЭМ ЃЈ c ЃЉ жИСюБэ
ЭМЁЁЫГађЙІФмЭМгыЬнаЮЭМЕФЖдгІЙиЯЕ
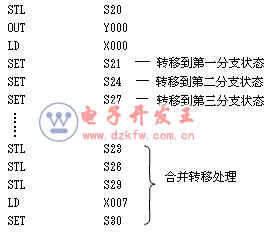
ST L ДЅЕуЧ§ЖЏЕФЕчТЗПщга 3 ИіЙІФмЃКЂйЖдИКдиЕФЧ§ЖЏДІРэЃЌМД дкетвЛВНвЊзіЪВУДЃЛ ЂкжИЖЈзЊвЦЬѕМўЃЌ МДТњзуИУЬѕМўдђЭЫГіетвЛВНЃЛ ЂлжИЖЈзЊвЦФПБъЃЌ МДЯТвЛВНзДЬЌЪЧЪВУД ЁЃ
2. ЁЁВННјЬнаЮЭМБрГЬЙцдђ
ЃЈ 1 ЃЉГѕЪМВНПЩгЩЦфЫќВНЧ§ЖЏЃЌЕЋдЫааПЊЪМЪББиаыгУЦфЫќЗНЗЈдЄЯШзїКУЧ§ЖЏЃЌЗёдђзДЬЌСїГЬВЛПЩФмЯђЯТНјааЁЃ
ЃЈ 2 ЃЉВННјЬнаЮЭМБрГЬЫГађЮЊЃКЯШНјааЧ§ЖЏЃЌКѓНјаазЊвЦЁЃЖўепЕФЫГађВЛФмЕпЕЙЁЃ
ЃЈ 3 ЃЉБрГЬЪББиаыЪЙгУ STL жИСюЖдгІгкУПвЛИіЫГађЙІФмЭМЩЯЕФВНЁЃ
ЃЈ 4 ЃЉИї STL ДЅЕуЕФЧ§ЖЏЕчТЗвЛАуЗХдквЛЦ№ЃЌзюКѓвЛИі STL ЕчТЗНсЪјЪБЃЌвЛЖЈвЊЪЙгУВННјЗЕЛижИСю RET ЪЙЦфЗЕЛижїФИЯпЁЃ
ЃЈ 5 ЃЉ STL ДЅЕуПЩвджБНгЧ§ЖЏвВПЩвдЭЈЙ§Б№ЕФДЅЕуЧ§ЖЏЃЌШч Y ЁЂ M ЁЂ S ЁЂ T ЁЂ C ЕШдЊМўЕФЯпШІКЭгІгУжИСюЁЃ
ЃЈ 6 ЃЉЧ§ЖЏИКдиЪЙгУ OUT жИСюЃЌЕБЭЌвЛИКдиашвЊСЌајЖрВНЧ§ЖЏЪБПЩЪЙгУЖржиЪфГіЃЌвВПЩЪЙгУ SET жИСюНЋИКдижУЮЛЃЌЕШЕНИКдиВЛашвЊЧ§ЖЏЪБдйгУ RST жИСюНЋЦфИДЮЛЁЃ
ЃЈ 7 ЃЉгЩгк CPU жЛжДааЛюЖЏВНЖдгІЕФЕчТЗПщЃЌвђДЫЪЙгУ STL жИСюЪБдЪаэЁАЫЋЯпШІЁБЪфГіЃЌМДВЛЭЌЕФ STL ДЅЕуПЩвдЗжБ№Ч§ЖЏЭЌвЛБрГЬдЊМўЕФвЛИіЯпШІЁЃ
ЃЈ 8 ЃЉгы STL ДЅЕуЯрСЌЕФДЅЕуЪЙгУ LD Лђ LDI жИСюЁЃ
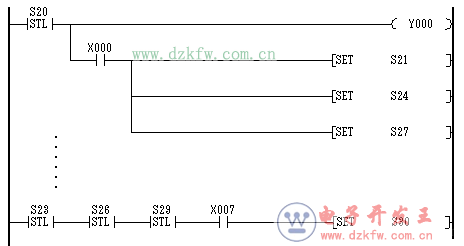
ЃЈ 9 ЃЉдкВНЕФЛюЖЏзДЬЌЕФзЊвЦЙ§ГЬжаЃЌЯрСкСНВНЕФзДЬЌЦїЛсЭЌЪБ ON вЛИіЩЈУшжмЦкЃЌДЫЪБПЩФмЛсв§ЗЂЫВЪБЕФЫЋЯпШІЮЪЬтЁЃЮЊСЫБмУтВЛФмЭЌЪБНгЭЈЕФСНИіЪфГіЃЈШчЯТЭМЫљЪОПижЦЕчЖЏЛње§ЗДзЊЕФНгДЅЦїЯпШІЃЉЭЌЪБЖЏзїЃЌГ§СЫдкЬнаЮЭМжаЩшжУШэМўЛЅЫјЕчТЗЭтЃЌЛЙгІдк PLC ЭтВПЩшжУгЩГЃБеДЅЕузщГЩЕФгВМўЛЅЫјЕчТЗЁЃ
ЭМЁЁе§ЗДзЊЕФШэМўЛЅЫјПижЦ
ЃЈ 10 ЃЉ SET жИСюКЭ OUT жИСюОљПЩвдгУгкВНЕФЛюЖЏзДЬЌЕФзЊвЦЃЌПЩНЋдРДЛюЖЏВНЖдгІЕФзДЬЌЦїИДЮЛЃЌНЋКѓајВНжУЮЊЛюЖЏВНЃЌДЫЭтЛЙгаздБЃГжЙІФмЁЃ
(11) ВЂааађСаКЭбЁдёађСажаЗжжЇДІЕФжЇТЗЪ§ВЛФмГЌЙ§ 8 ЁЃ
(12) дкзЊвЦЬѕМўЖдгІЕФЕчТЗжаЃЌВЛФмЪЙгУ ANB ЁЂ ORB ЁЂ MPS ЁЂ MRD ЁЂ MPP жИСюЁЃ
ЖўЁЂЕЅађСаБрГЬ
ЫЭСЯаЁГЕПЊЪМЪБЭЃдкгвВрЯоЮЛПЊЙи X1 ДІЃЌШчЯТЭМЫљЪОЁЃАДЯТЦ№ЖЏАДХЅ X3 ЃЌ Y2 ЮЊ ON ЃЌДђПЊСЯЖЗЕФеЂУХЃЌПЊЪМзАСЯЃЌЭЌЪБЖЈЪБЦї T0 ЖЈЪБЃЌ 8s КѓЙиБеСЯЖЗЕФеЂУХЃЌ Y2 БфЮЊ OFF ЃЌ Y1 БфЮЊ ON ЃЌПЊЪМзѓааЁЃХіЕНЯоЮЛПЊЙи X2 КѓЭЃЯТРДаЖСЯЃЌ Y1 БфЮЊ OFF ЃЌ Y3 БфЮЊ ON ЃЌЭЌЪБЖЈЪБЦї T1 ПЊЪМЖЈЪБЁЃ 10s Кѓ Y3 БфЮЊ OFF ЃЌ Y0 БфЮЊ ON ЃЌПЊЪМгвааЃЌХіЕНЯоЮЛПЊЙи X1 КѓЗЕЛиГѕЪМзДЬЌЃЌДЫЪБ Y0 БфЮЊ OFF ЃЌаЁГЕЭЃжЙдЫааЁЃ
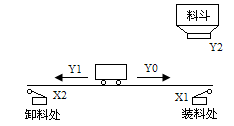
ЭМЁЁдЫСЯаЁГЕЙЄзїЪОвтЭМ
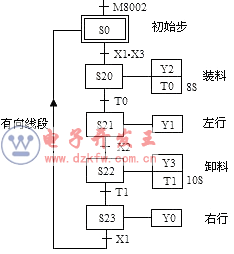
гЩдЫСЯаЁГЕЕФЙЄвевЊЧѓПЩжЊЃЌетЪЧвЛИіЫГађСїГЬПижЦЙ§ГЬЃЌЩшМЦЦфЫГађЙІФмЭМЕФВНжшШчЯТЃК
ЃЈ 1 ЃЉНЋећИіЙЄзїЙ§ГЬАДЙЄађНјааЗжНтЃЌУПИіЙЄађЖдгІвЛИіВНЃЈМДзДЬЌЃЉЃЌВНЕФЗжХфШчЯТЫљЪОЁЃ
ГѕЪМзДЬЌЃК S0 ЁЃ
зАСЯЃК S20 ЁЃ
зѓааЃК S21 ЁЃ
аЖСЯЃК S22 ЁЃ
гвааЃК S23 ЁЃ
ДгвдЩЯЙЄзїЙ§ГЬЕФЗжНтПЩвдПДГіЃЌИУПижЦЯЕЭГвЛЙВга 5 ВНЁЃ
ЃЈ 2 ЃЉЖдгІгкУПвЛИіВНЕФЖЏзїЁЃ
S0 ЃКЮоЖЏзїЁЃ
S20 ЃКЧ§ЖЏ Y2 ЮЊ ON ЃЌаЁГЕзАСЯЃЌЭЌЪБЦ№ЖЏЖЈЪБЦї T0 ЖЈЪБ 8s ЁЃ
S21 ЃКЧ§ЖЏ Y1 ЮЊ ON ЃЌаЁГЕПЊЪМзѓааЁЃ
S22 ЃКЧ§ЖЏ Y3 ЮЊ ON ЃЌаЁГЕаЖСЯЃЌЭЌЪБЦ№ЖЏЖЈЪБЦї T1 ЖЈЪБ 10s ЁЃ
S23 ЃКЧ§ЖЏ Y0 ЮЊ ON ЃЌаЁГЕгвааЁЃ
ЃЈ 3 ЃЉевГіУПИіВНЕФзЊвЦЬѕМўЁЃ
гЩЙЄзїЙ§ГЬПЩжЊЃЌУПвЛВНЕФзЊвЦЬѕМўЮЊЃК
S0 ЃК PLC ЩЯЕчжЎГѕгЩГѕЪМЛЏТіГх M8002 ЃЈжЛБеКЯвЛИіЩЈУшжмЦкЃЉЖдЦфжУЮЛЮЊ ON ЃЌЮЊвдКѓЛюЖЏВНЕФзЊвЦзїзМБИЃЌдкЙЄзїЙ§ГЬжаЃЌгЩгвЯоЮЛЖдЦфжУЮЛЮЊ ON ЁЃ
S20 ЃКаЁГЕдкгвЯоЮЛ X1 ДІВЂЧвАДЦ№ЖЏАДХЅ X3 ЃЌМД ![]() ЁЃ
ЁЃ
S21 ЃК T0 ЕФГЃПЊДЅЕуЁЃ
S22 ЃКзѓЯоЮЛ X2 ЁЃ
S23 ЃК T1 ЕФГЃПЊДЅЕуЁЃ
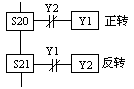
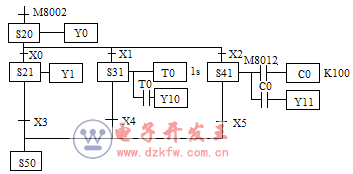
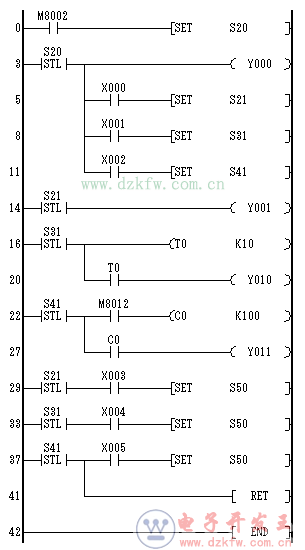
ОЙ§ЩЯЪі 3 ИіВНжшЃЌЕУЕНЕФаЁГЕПижЦЯЕЭГЕФЫГађЙІФмЭМШчЯТЭМЫљЪОЁЃЯТЭМЃЈ b ЃЉКЭЭМЃЈ c ЃЉЗжБ№ЮЊЯргІЕФЬнаЮЭМКЭжИСюБэЁЃ
ЃЈ a ЃЉЫГађЙІФмЭМ

ЃЈ b ЃЉЬнаЮЭМ
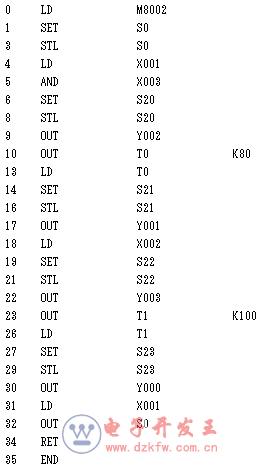
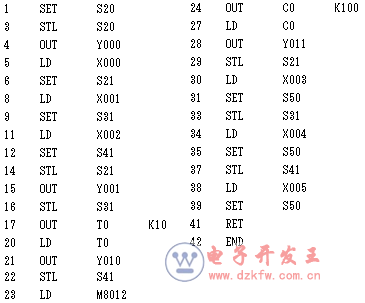
ЃЈ c ЃЉжИСюБэ
ЭМЁЁЕЅађСаБрГЬ
Ш§ЁЂбЁдёађСаБрГЬ
ДгЖрИіЗжжЇСїГЬжабЁдёФГвЛИіЕЅжЇСїГЬЃЌГЦжЎЮЊбЁдёадЗжжЇЁЃ
бЁдёађСаЕФЫГађЙІФмЭМгыВННјЬнаЮЭМжЎМфЕФзЊЛЛЯТЭМЃЈ a ЃЉЁЂЃЈ b ЃЉКЭЃЈЃуЃЉЫљЪОЁЃ
ЃЈЃсЃЉЫГађЙІФмЭМ
ЃЈЃтЃЉ ЬнаЮЭМ
ЃЈcЃЉ жИСюБэ
ЭМ бЁдёађСаЖдгІЕФЬнаЮЭМКЭжИСюБэ
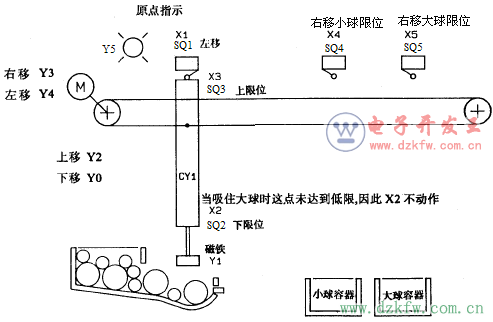
ЯТЭМЮЊЪЙгУДЋЫЭДјНЋДѓЁЂаЁЧђЗжРрбЁдёДЋЫЭЕФзАжУЪОвтЭМЁЃЦфЖЏзїЫГађЮЊЯТНЕЁЂЮќЙЄМўЁЂЩЯЩ§ЁЂгввЦЁЂЯТНЕЁЂЪЭЗХЙЄМўЁЂЩЯЩ§ЁЂзѓвЦЁЃзѓЩЯЮЊдЕуЃЌЕБЛњаЕБлЯТНЕЧвЕчДХЬњЮќзЁДѓЧђЪБЃЌЯоЮЛПЊЙи SQ2 ЖЯПЊЃЌЖјЮќзЁаЁЧђЪБ SQ2 НгЭЈЃЌвдДЫХаЖЯДѓЧђЛђаЁЧђЁЃ
зѓвЦЁЂгввЦЗжБ№гЩ Y4 ЁЂ Y3 ПижЦЃЌЩЯЩ§ЁЂЯТНЕЗжБ№гЩ Y2 ЁЂ Y0 ПижЦЃЌНЋЙЄМўЮќзЁгЩ Y1 ПижЦЁЃЕБЛњаЕБлвЦЕНЩЯЯоЮЛЁЂзѓЯоЮЛВЂЫЩПЊЪБЮЊдЕуЮЛжУЃЌМД ![]() ЃЌ Y5 ЮЊдЕужИЪОЁЃ
ЃЌ Y5 ЮЊдЕужИЪОЁЃ
ЩЯЯоЮЛЃК SQ3 ЈD X3
ЯТЯоЮЛЃК SQ2 Ѓ X2
зѓЯоЮЛЃК SQ1 ЈD X1
гввЦаЁЧђЯоЮЛЃК SQ4 ЈD X4
гввЦДѓЧђЯоЮЛЃК SQ5 ЈD X5
ЭМЁЁДѓЁЂаЁЧђЗжМ№ЪОвтЭМ
ИљОнЙЄвевЊЧѓЃЌИУПижЦСїГЬПЩвРОн SQ2 ЕФзДЬЌЃЈМДЖдгІДѓЁЂаЁЧђЃЉЗжГЩСНИіЗжжЇЃЌШчЯТЭМЫљЪОЁЃ

ЭМЁЁДѓЁЂаЁЧђЗжМ№ЫГађЙІФмЭМ
ИљОнЩЯЭМЃЌЕУЕНДѓЁЂаЁЧђЗжМ№ПижЦЯЕЭГЕФВННјЬнаЮЭМКЭжИСюБэШчЯТЭМЃЈ a ЃЉКЭЃЈ b ЃЉЫљЪОЁЃ
(a) ЬнаЮЭМ
ЃЈ b ЃЉжИСюБэ
ЭМЁЁДѓЁЂаЁЧђЗжМ№ЯЕЭГВННјЬнаЮЭМКЭжИСюБэ
ЫФЁЂВЂааађСаБрГЬ
ЯТЭМЫљЪОЮЊВЂааЗжжЇЕФЫГађЙІФмЭМЃЌВЂааЗжжЇЪЧжИЭЌЪБДІРэЕФГЬађСїГЬЁЃ

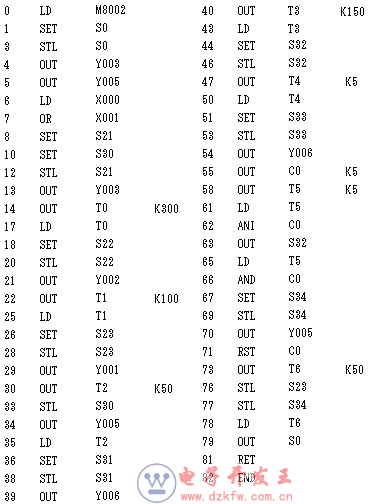
ЭМ ВЂааађСаЕФЫГађЙІФмЭМ
ЦфЬнаЮЭМКЭжИСюБэМћЯТЭМжаЕФЃЈ a ЃЉЭМКЭЃЈ b ЃЉЭМЁЃ
ЃЈ a ЃЉ ЬнаЮЭМ
ЃЈ b ЃЉ жИСюБэ
ЭМ ВЂааађСаЖдгІЕФЬнаЮЭМКЭжИСюБэ
ЯТЭМЫљЪОЮЊАДХЅЪНШЫааЕРКьЁЂТЬЕЦНЛЭЈЙмРэЦїЃЌЫќЪЧвЛИіВЂааЗжжЇгыЛуКЯађСаЁЃ
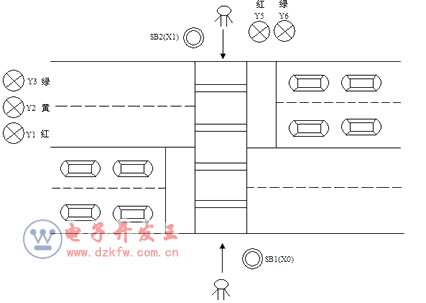
ЭМ АДХЅЪНШЫааЕРНЛЭЈЕЦЪОвтЭМ
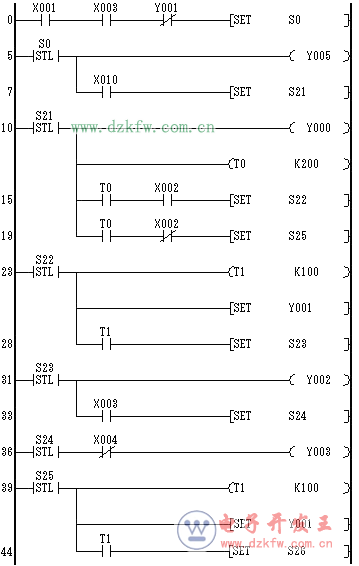
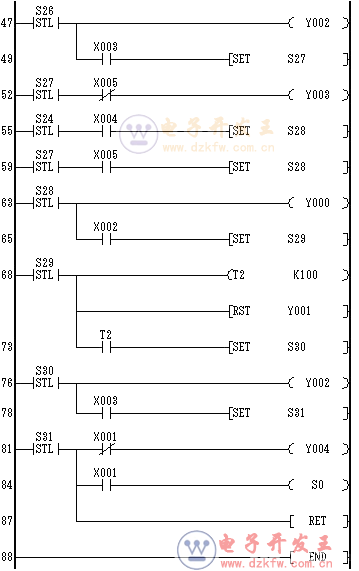
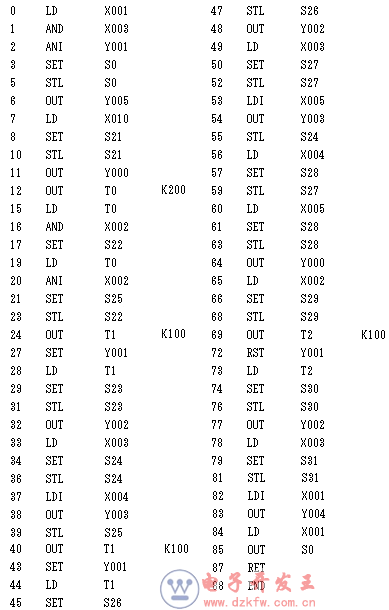
е§ГЃЧщПіЯТЃЌЦћГЕЭЈааЃЌМД Y3 ТЬЕЦССЁЂ Y5 КьЕЦССЃЛЕБааШЫашвЊЙ§ТэТЗЪБЃЌдђАДЯТАДХЅ X0 ЃЈЛђ X1 ЃЉЃЌ 30s КѓжїИЩЕРНЛЭЈЕЦЕФБфЛЏЮЊТЬЁњЛЦЁњКьЃЈЦфжаЛЦЕЦСС 10s ЃЉЃЌЕБжїИЩЕРКьЕЦССЪБЃЌШЫааЕРДгКьЕЦзЊГЩТЬЕЦССЃЌ 15s КѓШЫааЕРТЬЕЦПЊЪМЩСвЋЃЌЩСвЋ 5 ДЮКѓзЊШыжїИЩЕРТЬЕЦССЃЌШЫааЕРКьЕЦССЁЃ
ЯТЭМЪЧШЫааЕРНЛЭЈЕЦЕФЫГађЙІФмЭМЃЌИУЭММШгаВЂааЗжжЇЃЌгжгабЁдёЗжжЇЁЃ
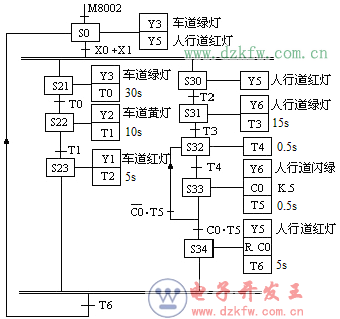
ЭМ ШЫааЕРНЛЭЈЕЦЫГађЙІФмЭМ
ЦфВННјЬнаЮЭМКЭжИСюБэЗжБ№МћЯТЭМЃЈ a ЃЉКЭЃЈ b ЃЉЁЃ

ЃЈ a ЃЉЬнаЮЭМ
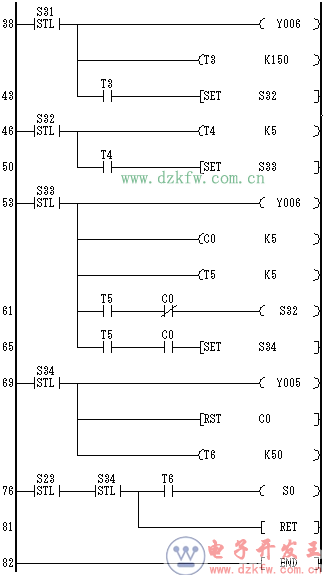
ЃЈ b ЃЉжИСюБэ
ЭМ ШЫааЕРНЛЭЈЕЦЕФВННјЬнаЮЭМКЭжИСюБэ
 ЗЕЛиЖЅВП
ЗЕЛиЖЅВП ЫЂаТвГУц
ЫЂаТвГУц ЯТЕНвГЕз
ЯТЕНвГЕз