
- 任务描述
某企业承担了一个机械手控制系统设计任务,要求用机械手将工件由A处抓取并放到B处,机械手控制示意图如下图所示。
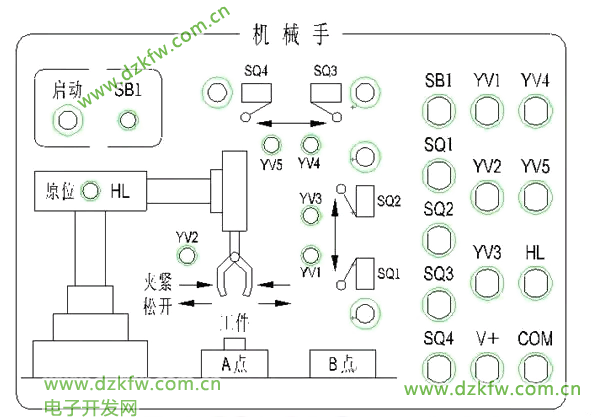
控制要求:机械手停在初始状态,SQ4=SQ2=1,SQ3=SQ1=0,原位指示灯HL点亮,按下“SB1”启动开关,下降指示灯YV1点亮,机械手下降,(SQ2=0)下降到A处后(SQ1=1)夹紧工件,夹紧指示灯YV2点亮;夹紧工件后,机械手上升(SQ1=0),上升指示灯YV3点亮,上升到位后(SQ2=1),机械手右移(SQ4=0),右移指示灯YV4点亮;机械手右移到位后(SQ3=1)下降指示灯YV1点亮,机械手下降;机械手下降到位后(SQ1=1)夹紧指示灯YV2熄灭,机械手放松。请用可编程控制器设计其控制系统并调试。
- I/O地址分配

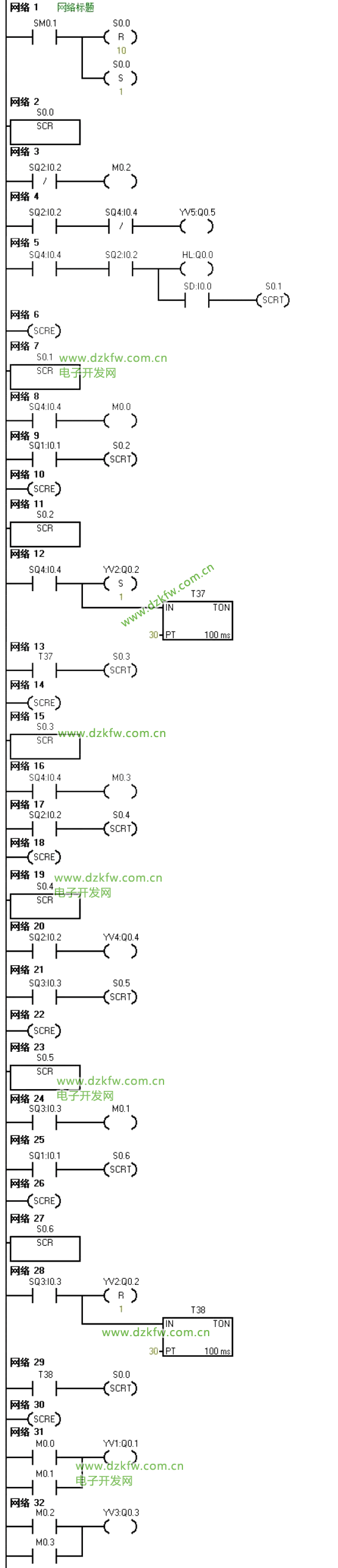
- 程序(梯形图)西门子S7-200 SMART PLC的机械手控制控制系统设计
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底