
关键字:机器人
在日常生活和学习中充斥着高新技术的今天,“低技术”表达的是回归自然和传统,去挖掘人类早已拥有的聪明才智。低技术不要求我们一味地追求技术的尖端化,但其所展现的科技成果和科学理念同样精彩。本文将通过一部寻光机器人的制作,向大家展示低技术的魅力。
一、低技术机器人
寻光机器人,相信很多机器人爱好者都曾经研究和实际制作过。常见的设计思路是采用一对光电传感器检测环境光,传感器的输出信号送入单片机I/O口,或者AD口(进行AD变换,视传感器输出信号而定),经过程序算法,电机驱动电路来驱动一对减速电机或者步进电机做差速运转,带动机器人向着光线强的位置运动。这类解决方案,从机器人电子部分的造价来看,现在市场上机器人专用光电传感器大概在20元一只;单片机,常见的51、AVR、PIC在5~10元,与之配套的PCB工程板在50元左右;双电机驱动芯片L293、L298在8元左右;此外还有单片机编程所需的配套软件,下载烧录硬件等。
那么,用低技术的设计思路来制作一个寻光机器人,可以把电路简化到什么程度呢?它的造价又可以做到多低呢?答案是只需要三个元件:一片NE555和一对光敏电阻。这个低技术机器人的电子部分,造价将小于1元。NE555寻光机器人的线路如图1所示。它是由GrantM在2001年设计的。
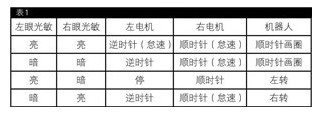
从图1中可以看出,NE555工作在双稳态,第2脚和6脚连接在一起构成施密特触发器模式。光敏电阻构成机器人的虚拟视野,用来检测机器人前方的环境光。机器人的左眼与右减速电机、右眼与左减速电机,是彼此协同工作的,根据双眼检测到的环境光线的差异,由NE555驱动两只电机做差速运转,驱动小车向着光线的方向前进。从电路的角度来看,非常简单,但是其实质上是一部可以移动的模拟计算机,光敏电阻是这部计算机的输入设备,电机是输出设备。注意机器人在物理结构上对两个光敏电阻和减速电机的安装位置有严格要求,图1中所示的左右方位是从车尾向车头看的,还需要注意两只电机的极性不可接反,否则会出现机器人运转紊乱的现象。
表1归纳了机器人在不同环境光下的运动特性。,受光敏电阻夹角位置,元件电气对称性,环境光的变化,电机和车体的结构的影响,实际机器人的运动方式非常复杂。笔者制作的这只机器人,放在中厅会寻着光线自己跑到阳台,在阳光下是做一种不规则的8字转动;在无光的环境下做顺时针转动。最奇妙的是,因为我使用了高灵敏度快速响应的光敏元件,这部机器人甚至可以“感觉”到墙壁的反光,对墙壁,衣柜,桌子腿这些浅色高反光物体表现出一种避障特性(靠近墙壁会自己拐弯)。下面是我制作NE555寻光机器人的过程。
二、制作寻光机器人
业余制作机器人是一件非常有趣的事情,爱好者不光要处理好电路的问题,还要解决机械结构的问题。而制作一部个性十足的移动式机器人的底盘,就需要好好动一番脑筋了。
制作这个底盘的原则是在满足功能的前提下,结构尽量简单,同时兼顾一点艺术性。

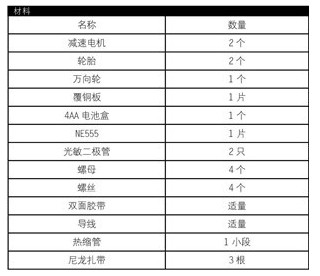
从图2中可以看到,这部机器人移动平台使用的是最常见,最普通的材料。轮胎、减速电机和万向轮是入门级小车机器人的标准配置,在网上可以很容易买到。车体使用一片覆铜板边角料加工而成。为了简化结构,替换方便,电机和电池盒使用双面胶带粘接的方式与车体固定。NE555选用常见的8脚双列直插式封装,方便焊接。光敏电阻没有特殊要求,可以使用能买到的任意规格的光敏元件,有的LED二极管也呈现出光敏特性,也可以直接拿来用。我使用的是一对直径5mm的红外线接收管,反相串联在+6V电源与地之间。红外线二极管的好处是适应光线范围大,响应时间比光敏电阻快,在阳光、灯光甚至家电遥控器下都可以灵敏的动作。

我使用一片厚度1.5mm的单面环氧树脂覆铜板作为机器人的主体结构(见图3)。覆铜板质轻,而且有着很好的强度和韧性,也很容易加工。铜皮一面作为机器人的顶部兼电源地,这样有两个好处:一是可以在铜皮面上迅速的搭建起机器人的电子部分;二是美观,黄铜的颜色使这部机器人看起来别具一格。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底