
��˵���µ����ſƼ��������˾�����һ������������Ϊ���͵Ļ���һ�廯�����ܼ��Ͳ�Ʒ���������ʵ���������أ�
�����˵Ŀ��Ʒ�Ϊ��е������ƺ��ŷ��������������࣬�ŷ�����ϵͳ����ʵ�ֻ����˻�е������ƺ��ŷ��������Ƶ���Ҫ���֡����Ҫ�˽�����˵��������̣���Ȼ�Ʋ����ŷ�ϵͳ��
�ŷ�ϵͳ
�ŷ�ϵͳ���Ա�Ƶ����Ϊ������չ�����IJ�Ʒ����һ���Ի�еλ�û�Ƕ���Ϊ���ƶ�����Զ�����ϵͳ���ŷ�ϵͳ���˿��Խ����ٶ���ת�ؿ����⣬�����Խ��о�ȷ�����١��ȶ���λ�ÿ��ơ�
������ŷ�ϵͳ�Ǿ�ȷ�ظ��ٻ���ij���������̵Ŀ���ϵͳ��Ҳ�ɳ����涯ϵͳ���M���ŷ�ϵͳ�ֳ�λ���涯ϵͳ���䱻����������������Ǹ��ػ�е�ռ�λ�õ���λ�ƻ��λ�ƣ���λ�ø���������������������仯ʱ��ϵͳ����Ҫ������ʹ��������ٶ�ȷ�ظ��ָ������ı仯��
һ���ŷ�ϵͳ�Ľṹ���
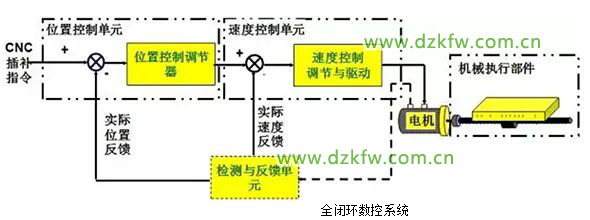
����һ�廯���ŷ�����ϵͳ�Ľṹ�����ͷ��࣬�����Զ��������۵ĽǶ����������ŷ�����ϵͳһ����������������ض���ִ�л��ڡ����ڡ��Ƚϻ��ڵ��岿�֡�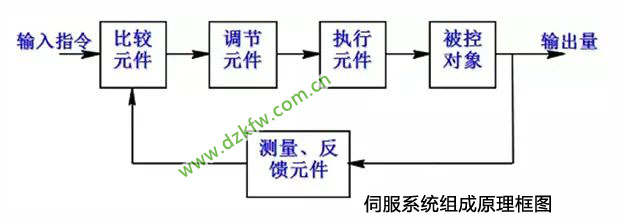
�ŷ�ϵͳ���ԭ����ͼ
�Ƚϻ����ǽ������ָ���ź���ϵͳ�ķ����źŽ��бȽϣ��Ի�������������ƫ���źŵĻ��ڣ�ͨ����ר�ŵĵ�·��������ʵ�֡�
2������������ͨ���Ǽ������PID�����������ֺ��֣����Ƶ�·������Ҫ�����ǶԱȽ�Ԫ�������ƫ���źŽ��б任�������Կ���ִ��Ԫ����Ҫ������
3ִ�л���
ִ�л��ڵ������ǰ������źŵ�Ҫ������ĸ�����ʽ������ת���ɻ�е�ܣ��������ض�����������һ�廯ϵͳ�е�ִ��Ԫ��һ��ָ���ֵ����Һѹ�������ŷ������ȡ�
4���ض���
���ض���ָ�����Ƶ����������һ����е�� �ۣ�����һ����е����ƽ̨��
5����
������ָ�ܹ���������в�����ת���ɱȽϻ�������Ҫ�����ٵ�װ�ã�һ�������������ת����·��
�����ŷ�ϵͳ���ص����
�ŷ�ϵͳ��һ������Ľ���ϵͳ�б����ϲ�����ܸ���ָ���źž�ȷ�ؿ���ִ�в������˶��ٶ���λ�á��ŷ�ϵͳ������װ�úͻ�������ϵ���ڣ�������ϵͳ����Ҫ��ɣ����������ص㣺
* ����߱��߾��ȵĴ���������ȷ�ظ���������ĵ��źš�* ���ʷŴ����Լ�����ϵͳ�������ǿ���ġ�* �㹻��ĵ��ٷ�Χ���㹻ǿ�ĵ��ٴ������ܡ�* ���ٵ���Ӧ�����ͽ�ǿ�Ŀ�����������
�����ŷ�ϵͳ������
��������ԭ���֣��п������ջ��Ͱ�ջ�������ʽ��
�������������ʷ֣���λ�ơ��ٶȡ��������ص��ŷ�ϵͳ��ʽ��
��������ʽ�֣��е�����Һѹ����ѹ���ŷ�������ʽ��
��ִ��Ԫ���֣��в�������ŷ���ֱ������ŷ��ͽ�������ŷ���ʽ
�ġ��ŷ�ϵͳ��ִ��Ԫ��
�������õ�ִ��Ԫ���IJ�ͬ���ɽ��ŷ�ϵͳ�ֳɵ���ʽ��Һѹʽ����ѹʽ�������ŷ�ϵͳ�������ŷ�ϵͳ�����ŷ��綯����Ϊִ��Ԫ�����ڻ���һ�廯��Ʒ��Ӧ�ñȽϹ㷺��
1����ʽִ��Ԫ��
����ִ��Ԫ������ֱ����DC���ŷ������������AC���ŷ��������������Լ�������ȣ�����õ�ִ��Ԫ�������ŷ��������Ҫ����תƽ�����⣬һ�㻹Ҫ��̬���ܺã��ʺ���Ƶ��ʹ�ã�����ά�ȡ�
2Һѹʽִ��Ԫ��
Һѹʽִ��Ԫ����Ҫ���������˶��ס���ת�ס�Һѹ����ȣ���������Ϊ��������ͬ��������ʵ�����£�ҺѹԪ�����������ᡢ�����Ժõ��ص㡣
3��ѹʽִ��Ԫ��
��ѹʽִ��Ԫ��������ѹ�����������������⣬��Һѹʽִ��Ԫ��û��������ѹ������ɵõ��ϴ�����������г̺��ٶȣ������ڿ���ճ�Բ���п�ѹ���ԣ��ʲ����ڶ�λ����Ҫ��ϸߵij���ʹ�á�
�塢�������͵�����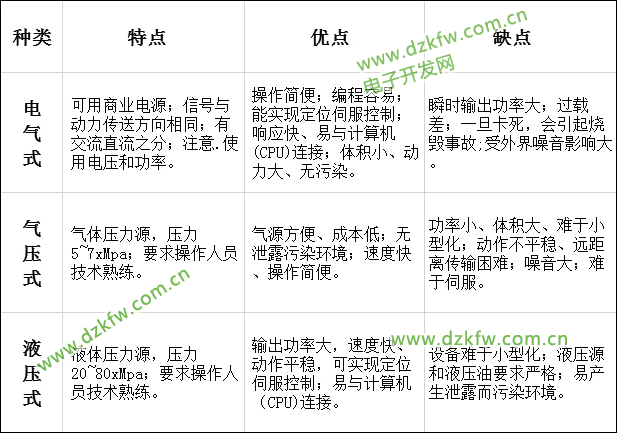
���õĿ��Ƶ��
�����õ���ǵ����ŷ�����ϵͳ�Ķ������������ǽ�����ת��Ϊ��е�ܵ�һ������ת��װ�á�����һ�廯��Ʒ�г��õĿ����õ����ָ���ṩ��ȷ�˶���ϸ��Ӷ������ŷ�����������õ���л�ת��ֱ�����������ͨ����ѹ��������Ƶ�ʣ�����ָ�����壩�ȿ��ƣ�ʵ�ֶ��١�����������������ֹͣ�����������Լ����ӵ���������������������������IJ�ͬ����ͬ���ŷ��������һ����ָ�����������Stepping Motor����ֱ���ŷ������DC Servo Motor���������ŷ������AC Servo Motor����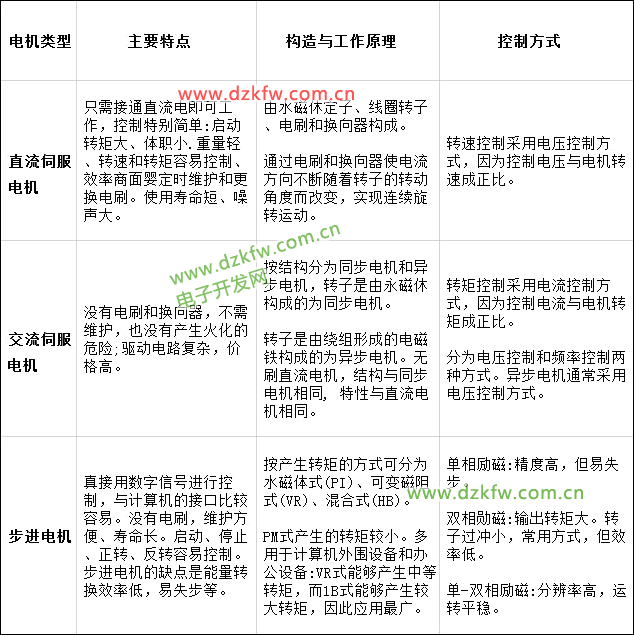
�����ŷ����Ƶ綯���Ŀ��Ʒ�ʽ��Ҫ�У��������ơ���ջ����ơ��ջ��������֡��ջ�ϵͳ������ϵͳ����λ�ã����ٶȣ��������ڣ�����ϵͳû��λ�����ٶȷ������ڡ�
һ����������ϵͳ
û��λ�ò���װ�ã��ź����ǵ���ģ�����װ�á�����ϵͳ������ϵͳ�ȶ��Ժá�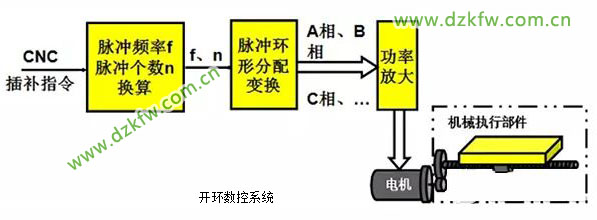
��λ�÷�����������Աջ�ϵͳ�������ߣ��侫����Ҫȡ�����ŷ�����ϵͳ�ͻ�е�������������ܺ;��ȡ�һ���Թ��ʲ��������Ϊ�ŷ�����Ԫ��������ϵͳ���нṹ�������ȶ������Է��㡢ά���۸�������ŵ㣬�ھ��Ⱥ��ٶ�Ҫ�ߡ��������ز���ij��ϵõ��㷺Ӧ�á�һ�����ھ��������ػ�����
������ջ�����ϵͳ
��ջ�����ϵͳ��λ�ò�������ͼ��ʾ���Ǵ�����װ�ã������ŷ��������˿��������������ת�ǶȽ��м�⣬����ֱ�Ӽ���˶�������ʵ��λ�á�
��ջ���·�ڲ�������ֻ����������е�������ڣ���˿ɻ���ȶ��Ŀ������ܣ���ϵͳ���ȶ����䲻�翪��ϵͳ�����ȱջ�Ҫ�á�����˿�ܵ��ݾ����ͳ��ּ�϶������˶����������������ˣ��侫�Ƚϱջ���Ͽ����á����ɶ����������в���������Կɻ������ľ��ȡ���ջ�����ϵͳ�ṹ�����Է��㡢����Ҳ�ϸߣ�������ִ�CNC�����еõ��˹㷺Ӧ�á�
����ȫ�ջ�����ϵͳ
ȫ�ջ�����ϵͳ��λ�ò�������ͼ��������ʾ��ֱ�Ӷ��˶�������ʵ��λ�ý��м�⡣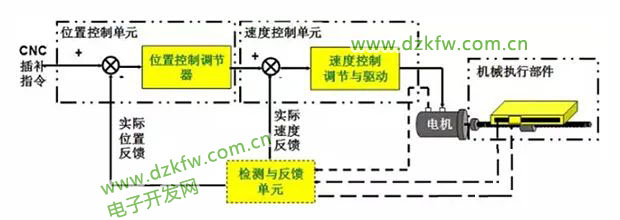
�������Ͻ��������������������ʹ������ڵ�����϶��ʧ���������кܸߵ�λ�ÿ��ƾ��ȡ�����λ�û��ڵ������е�������ڵ�Ħ�����ԡ����Ժͼ�϶���Ƿ����Եģ��ʺ��������ϵͳ�IJ��ȶ���ʹ�ջ�ϵͳ����ơ���װ�͵��Զ��൱���ѡ�
��ϵͳ��Ҫ���ھ���Ҫ��ܸߵ���ϳ������������������ĥ���Լ��ϴ��͵����ػ����ȡ�
�����˵��ŷ�ϵͳ
ͨ������£�������˵���������ŷ�ϵͳ��ָӦ���ڶ����˶����Ƶľ����ŷ�ϵͳ��һ�������˶�����ϵͳ���ɸ߽��˶���������ͽ��ŷ�����������ɣ��˶������������˶������������롢����λ�ÿ�����˴˼������˶����Ӽ����������Ƶȣ�����Ҫ�������ڽ�������ϵͳ�˶����Ƶ�·�����ŷ������������ŷ������λ�ÿ��ƣ�����Ҫ�������ڽ����ŷ��������
�����˵��ŷ�ϵͳ���ŷ�������ŷ���������ָ��������ֹ��ɡ��ŷ������ִ�л��������ǿ�����ʵ���˶��ģ��ŷ����������ŷ�����Ĺ��ʵ�Դ��ָ������Ƿ�������߸��ٶ���������ŷ����������������ġ�
�����˶��ŷ������Ҫ��������������ֶ��ߡ�
����Ҫ���ŷ�������п�����Ӧ�ԡ�����ӻ��ָ���źŵ����ָ����Ҫ��Ĺ���״̬��ʱ��Ӧ�̡���Ӧָ���źŵ�ʱ�����̣����ŷ�ϵͳ�����������ߣ�������Ӧ�������ã�һ�������ŷ�����Ļ���ʱ�䳣���Ĵ�С��˵���ŷ����������Ӧ�����ܡ���Σ��ŷ��������ת�ع�����Ҫ�����������ص�����£�Ҫ������˵��ŷ��������ת�ش�ת������С������ŷ����Ҫ���п������Ե������Ժ�ֱ���ԣ����ſ����źŵı仯�������ת���������仯����ʱ����ת��������źų����Ȼ���Ƴ����ȡ���Ȼ��Ϊ����ϻ����˵����Σ��ŷ�����������С������С������ߴ�̡���Ҫ���ܵ�����̵������������ɽ���ʮ��Ƶ����������ͼӼ������У������ڶ�ʱ���ڳ����������ء�
�ŷ��������ǿ����ø��ֵ�����������غ�����ֱ�ӻ��ӵ����������˱����Ի�û����˵ĸ����˶���ִ�л���������ת��ת�������ȸߡ���ˢ��������ŵ㣬�ڻ�������Ӧ�ñȽϹ㷺��
�ŷ�ϵͳ�ķ�չ����
�����ŷ�ϵͳ��Ӧ��Խ��Խ�㣬�û����ŷ�����������Ҫ��ҲԽ��Խ�ߡ��ܵ���˵���ŷ�ϵͳ�ķ�չ���ƿ��Ը���Ϊ���¼������棺���ɻ����ŷ�����ϵͳ���������Խ��Խ��ز��ÿ���Ƶ�ʺܸߵ������ʰ뵼������������������������롢�ܺ��ƶ������¡���ѹ������������������ϵȹ���ȫ��������һ�������ģ��֮�У����ɸ߾��ȵ�ȫ�ջ�����ϵͳ���߶ȵļ��ɻ���������С����������ϵͳ����������ܻ����ŷ�ϵͳ�����ܻ����������¼������棺ϵͳ���������в���������ͨ���˻��Ի��ķ�ʽ������������;���Ƕ����й�����������������;�����������Ĺ��ܵȡ��������������ܵ��ŷ���Ԫ����ͨ�����������У��Զ���ϵͳ�IJ����������������Զ�ʵ�������Ż������绯���ŷ�ϵͳ���绯���ۺ��Զ���������չ�ı�Ȼ���ƣ��ǿ��Ƽ����������������ͨ�ż������ϵIJ��������������˵�ġ����Ǽ��Ǿ����Ǹ����û���������û�ʹ�õ��ŷ���������ǿ����ʹ֮ר������������ʹ�õ�һЩ�������Ծ��Ӷ��������ŷ�ϵͳ�ɱ���Ϊ�ͻ������������档�����˵Ĺ����������ŷ�ϵͳӰ�켫����������ŷ�ϵͳ�Ĺؼ�����ָ����Զ�����Ƚ��ԱȽϵ���Ҫ���ء������Ƚ��ŷ�ϵͳ�Ѿ��ܹ��ܺõ���Ӧ�������Ӧ�õ��������з���Դ�����ڸ���߶�Ӧ�ü����������������棬���ھ���ϸ�̽Ρ��ڹ�ҵ4.0�Ĵ��£������ŷ����ض���Զ������Ŭ���ϡ�
- END -
����ϵ����ת�أ���Ȩ��ԭ�������С�����ת���ڶ࣬��ȷ������ԭʼ���ߣ��ʽ�δ����ת����Դ��
 ���ض���
���ض��� ˢ��ҳ��
ˢ��ҳ�� �µ�ҳ��
�µ�ҳ��