
本篇博客我们来探究下多旋翼无人机的飞行原理
力的来源
飞行原理从根上说的话就是系统运动力的来源是什么?在基本组成部分介绍了无人机的动力系统:电调-电机-螺旋桨 。
给人最直观的感受就是 电机带动螺旋桨转,产生升力。
螺旋桨旋转产生升力的原因,在很多年前伯努利就给出了解释,简单说就是流速大,压强小;流速小,压强大,也就是伯努利定理。伯努利原理是流体力学中的一条基本原理,它由瑞士流体物理学家丹尼尔・伯努利在1726年提出,其实质是理想流体的机械能守恒。在理想条件下,同一流管的任何一个截面处,单位体积流体的动能、势能和压力势能之和是一个常量 。其最为著名的推论为:等高流动时,流速越大,压强越小。流体力学中经常说的压力,其实指的是单位面积上的压力,也就是普通物理学里说的压强。
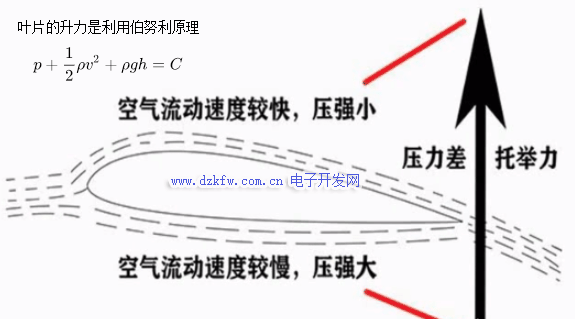

可以看到螺旋桨的桨面并不是平的,旋转时桨面上下的空气流速不一直,会产生向上的推力。
飞行原理
上面我们知道了飞行动力的来源,下面我们来详细介绍下多旋翼无人机的飞行原理。
以四轴飞行器为例。四轴飞行器系统采用位于机臂末端的电机带动螺旋桨旋转产生反作用力方式实现飞行器的控制。单个螺旋桨向下吹动空气产生垂直向上的反作用力,及与旋转方向相反的空气摩擦阻力。
螺旋桨分为正桨和反桨,正桨逆时针旋转向下吹风,反桨顺时针旋转向下吹风。以正桨为例,其旋转时受力如图:
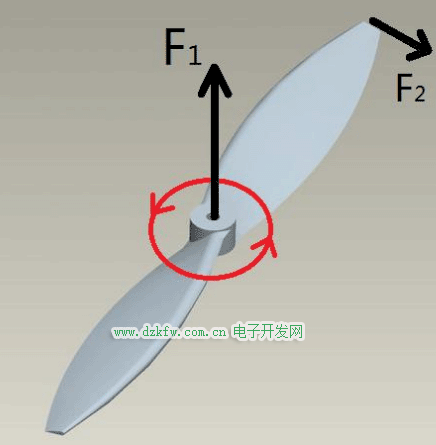
如图所示,红色为螺旋桨逆时针旋转方向,黑色 F1 为垂直向上的反作用力,
F2 为空气摩擦阻力。
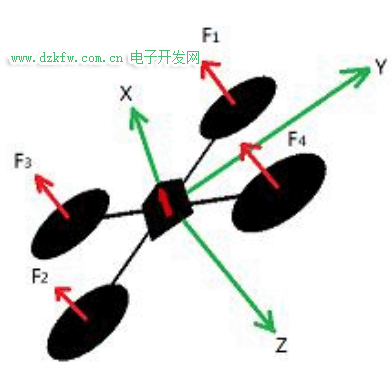
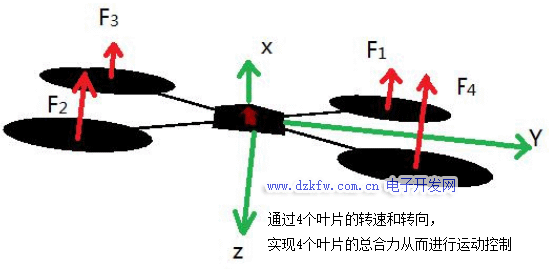
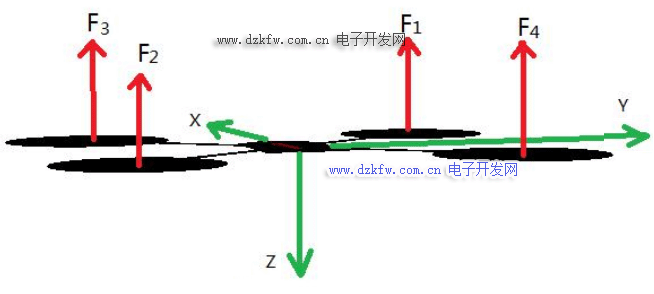
安螺旋桨布局位置不同四旋翼无人机可分为“十”和“X”型结构,以“X”型结构为例,下面分析“X”型结构的飞行原理。
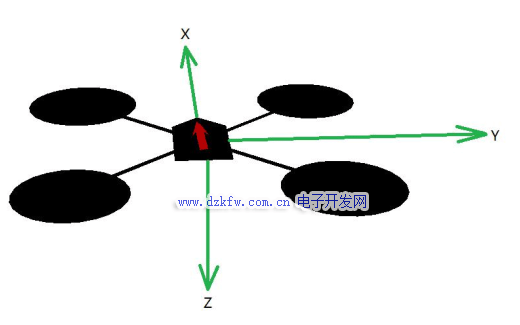
四轴飞行器系统可通过同时调节电机的转速,实现三维空间六自由度的飞行。以四旋翼飞行器质点为原点,机头前方为 x 轴正方向,机头右方为 y 轴正方向,机体垂直向下为 z 轴正方向,满足右手定则建立机体坐标系。
四轴飞行器系统的基本运动可分为绕 x 轴的横滚运动、绕 y 轴的俯仰运动、绕 z 轴的偏航运动以及沿 z 轴方向的升降运动。
横滚运动
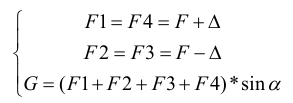
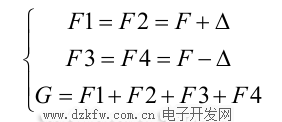
四轴飞行器系统通过同时加大 1 号和 4 号电机的转速、减小 2 号和 3 号电机的转速,产生 x 轴两侧的升力差,在理想情况下, 2、 3 号电机减小的百分比与 1、4 号电机增大的百分比相等,以此来保证飞行器系统垂直方向的合力为 0,同时产生沿 x 轴方向的水平分力,产生横滚角度α。
理想力学方程如下:
俯仰运动
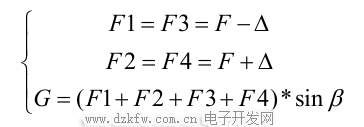
四轴飞行器系统通过同时加大 2 号和 4 号电机的转速、减小 1 号和 3 号电机的转速,产生 y 轴两侧的升力差,在理想情况下, 2、 4 号电机减小的百分比与 1、3 号电机增大的百分比相等,以此来保证飞行器系统垂直方向的合力为 0,同时产生沿 y 轴方向的水平分力,产生俯仰角度β。
理想力学方程如下:
偏航运动
四轴飞行器系统通过同时加大 1 号和 2 号电机的转速、减小 3 号和 4 号电机的转速,产生反扭矩力差,在理想情况下,1、2 号电机减小的百分比与 3、4 号电机增大的百分比相等,以此来保证飞行器系统垂直方向的合力为 0,同时产生绕 z 轴旋转的力。
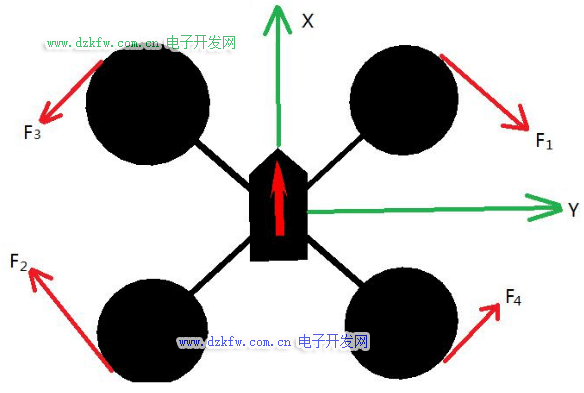
理想力学方程如下:
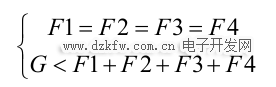
升降运动
同时增大或减小四个电机,当四个电机提供的拉力大于飞行器自身重力时将产生上升运动,当四个电机提供的拉力小于飞行器自身重力时将产生下降运动。
旋翼无人机运动本质就是控制电机的速度,相应地提高、减慢速度就可以让无人机以各种状态运动起来。
如果在 机架、动力、飞控、遥控器,齐全的情况下,在飞控中,不加入复杂的控制算法,仅将遥控器指令,转换为运动的电机转速增减量,即可让无人机在空中飞起来。但是此种情况的无人机会非常难以控制,需要不断的修各个方向的杆量,这就是所谓的纯手控模式,不建议尝试。
无人机的控制模式
纯手动模式
就是上面说的模式,遥控器的杆量,和运动模式的电机转速形成开环的控制量,无人机会异常灵敏,难以控制。这种模式在无人机的算法或者传感器出现问题,导致无人机自动控制无法实现的时候,可以尝试救一下。
姿态模式
姿态模式就是飞控层面起到了部分自动控制的功能。
飞控会通过各种传感器,感知自身的状态,包括姿态角度和姿态角速度。
同时飞控会通过接收遥控器的杆量,将杆量转为期望姿态值,然后通过闭环控制对无人机姿态值进行自动控制。
这种控制模式,相对纯手动来说,飞机会稳定很多,但是当遥控器杆量回中后,无人机会向一个方向飘,因为杆量回中代表期望姿态角度为0.但是在某方向上存在速度,无人机就按这个速度方向飘了出去。
定高模式
飞控自身会携带气压计,和惯导融合,感知自身高度状态,当油门杆量输入为中值时,以当前高度为期望高度,形成闭环控制。
无人机在z轴方向,可以实现位置稳定。水平方向相当于姿态模式,无法实现位置稳定。
悬停模式
飞控通过GPS或其它定位传感器,和惯导融合,感知自身位置状态。当杆量输入为中值时,以当前位置为期望位置,形成闭环控制。
无人机在x、y、z轴方向,可以实现位置稳定。
其它模式
这里把其它的模式归为一类,像自动航线模式、指点飞行模式、兴趣点环绕模式等,都是建立在悬停模式的基础上,只是期望位置的输入方式不一样罢了。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底