
比例值太小时的控制效果图:
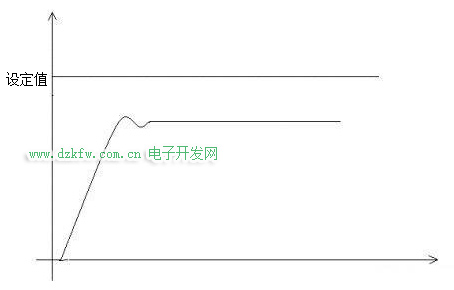
如果比例值太小,反馈值始终到不了设定值(静态误差)就达到了平衡(如果是加热的话就是说散热与P*e(t)加热达到了一个平衡)
比例值太大时的控制效果图:
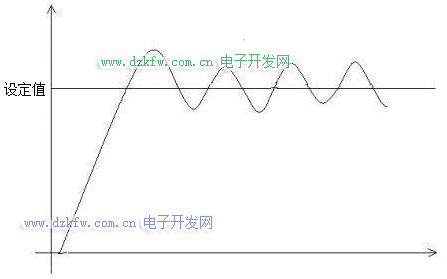
如果比例值太大,则被控对象会出上图所示的振荡,当然振荡点不一定是在设定值,而会根据被控对象的不同或者P值的大小而在某个位置进行振荡。这对于大多数的控制对旬来说是不允许的。
比例积分控制(PI):
积分的存在是针对比例控制要不就是有差值要不就是振荡的这种特点提出的改进,它常与比例一块进行控制,也就是PI控制。
其公式有很多种,但大多差别不大,标准公式如下:
u(t) = Kp*e(t) + Ki∑e(t) +u0
u(t)——输出
Kp——比例放大系数
Ki——积分放大系数
e(t)——误差
u0——控制量基准值(基础偏差)
大家可以看到积分项是一个历史误差的累积值,如果光用比例控制时,我们知道要不就是达不到设定值要不就是振荡,在使用了积分项后就可以解决达不到设定值的静态误差问题,比方说一个控制中使用了PI控制后,如果存在静态误差,输出始终达不到设定值,这时积分项的误差累积值会越来越大,这个累积值乘上Ki后会在输出的比重中越占越多,使输出u(t)越来越大,最终达到消除静态误差的目的。
PI两个结合使用的情况下,我们的调整方式如下:
1、先将I值设为0,将P值放至比较大,当出现稳定振荡时,我们再减小P值直到P值不振荡或者振荡很小为止(术语叫临界振荡状态),在有些情况下,我们还可以在些P值的基础上再加大一点。
2、加大I值,直到输出达到设定值为止。
3、等系统冷却后,再重上电,看看系统的超调是否过大,加热速度是否太慢。
通过上面的这个调试过程,我们可以看到P值主要可以用来调整系统的响应速度,但太大会增大超调量和稳定时间;而I值主要用来减小静态误差。
标准的PID公式在温控等响应较慢的系统中会存在积分项导致过冲的情况,这是因为在开始加热后,尽管这时输出已调整最大(比方说固态继电器的PWM输出已是100%开了)但这时的温度仍然只能缓慢上升,这时的积分项会增加得很快,当温度达到设定值后,这时尽管比例项已输出为0,但是积分项仍然会因为其累积值很高而有较大的输出,导致温度超调。
在德维森的V80中,通过改进的遇限消弱积分法等措施很好的解决了这个问题,使积分项在输出全开时停止积分,减少了积分对于这种大时延系统的影响。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底