
摘要: R,L,C是电子电路及系统的主要元件,R,L,C参数的测量方法有电桥法、谐振法、伏安法。其中,电桥法具有较高的测量精度,但电路复杂且需要进行电桥平衡调节,不宜完成快速的自动测量。由于测量方法的制约,谐振法需要很高的频率激励信号,一般无法完成较高精度的测量。伏安法在设计中必须完成矢量测量及除法运算,为了实现高精度测量,还需要采用低失真的正弦波信号和高精度的A/D,早期实现比较困难。由于计算机技术的发展,智能仪器的计算能力和控制能力有了较大提高,使伏安法在实际中得到广泛应用。 伏安法测量中,有固定轴法和自由轴法两种,固定轴法要求相敏检波器的相位参考基准严格地与标准阻抗电压的相位相同,对硬件要求很高,并且存在同相误差,已很少使用。自由轴法中相敏检波器的相位参考基准可以任意选择,只要求保持两个坐标轴准确正交(相差90°),从而使硬件电路简化。常见的自由轴法RLC测试仪采用模拟相敏检波器,测量精度低,速度慢。本文介绍一种基于数字鉴相的自由轴法RLC测量电路设计。
1 系统组成及测量原理
基于数字鉴相的自由轴法RLC测量系统构成如图1所示,主要由正弦信号源U0、前端测量电路、相敏检波器、A/D转换器、微处理器、基准相位发生器以及键盘、显示电路等组成。

为了提高信号源精度,正弦信号源U0采用直接数字频率合成信号源(DDS)。R0为信号源内阻,RS是标准电阻,Zx为被测阻抗,A为高输入阻抗、高增益放大器,主要完成电流一电压变换功能。测量时,开关S通过程控置于Ux或US端。由图1有:UX=IOZX,US=-IORS,被测阻抗ZX为:

由式(1)可知,只要测出UX,US在直角坐标系中两坐标轴x,y上的投影分量,经过四则运算,即可求出测量结果。
图1中,被测信号与相位参考基准信号经过相敏检波器后,输出就是被测信号在坐标轴上的投影分量。相位参考基准代表着坐标轴的方向,为了得到每一被测电压(US或UX)在两坐标轴上的投影分量,基准相位发生器需要提供两个相位相差90°的相位参考基准信号。需要指出的是在自由轴法中,相位参考基准与US没有确定关系,可以任意选择,即x,y坐标轴可以任意选择,只需保持两坐标轴准确正交90°。UX,US和坐标轴的关系如图2所示。
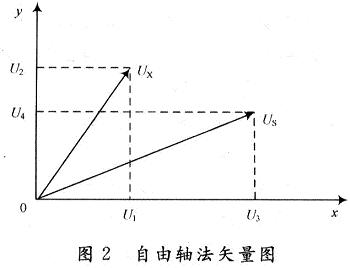
应用图1测量时,通过开关S选择某一被测量(如UX),基准相位发生器依次送出两个相位相差90°的相位参考基准信号,经相敏检波器后分别得到UX在两坐标轴上的投影分量U1,U2。类似,当开关S选择US时,可分别得到US在两坐标轴上的投影分量U3,U4。各投影分量经A/D转换器可得对应的数字量,再经微处理器计算便得到被测元件参数值。
下面以电容并联电路的测量为例,推导RLC参数的数学模型。
由图2可得:

式中:Ni为Ui对应的数字量,e为A/D转换器的刻度系数,即每个数字所代表的电压值。
由式(2),式(3)可知:
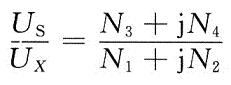

直接通过对N1~N4数值的运算,即可完成矢量除法运算。
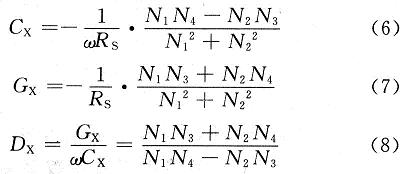
由式(1),式(4)可求得被测阻抗中的电容值CX及损耗角正切值DX。
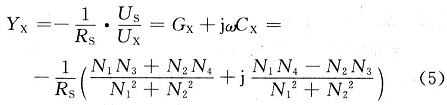
式中:GX为介质损耗电导。
进而有:
同理可以导出被测参数R,C的计算公式。
2 正弦信号源与相敏检波器
在自由轴法测量RLC原理电路(图1)中,正弦信号发生器、相敏检波器及基准相位发生器是RLC测量仪的关键部分。
2.1 正弦信号源
为了保证RLC测试仪的精度,要求信号源U0产生的正弦信号波形失真小,幅值稳定。自由轴法中,还要求信号源频率和相敏检波器相位基准信号的频率相同。所以正弦信号源与基准相位发生器在电路上密切相关。为了保证测试精度,采用直接数字频率合成DDS技术产生正弦信号激励源。DDS具有系统稳定性强,以及相位、频率精确可调的优点。图3所示为采用DDS的正弦信号源及相敏检波器原理图。

图3中时钟信号CLK经分频器后,得到依次二倍频率关系的8路信号,作为ROM1的地址输入,ROM1存放有256个按正弦规律变化的数据,即每一个存储单元存储的样点数据与其地址之间的关系和正弦波的幅值与时间轴的关系一致。在分频器输出8路信号作用下,ROM1依次输出正弦曲线样点数据,经D/A转换器后输出阶梯正弦波,再经滤波、放大,就得到了测试用的正弦激励信号。信号基础频率由单片机的P1.2和P1.3控制,若P1.2,P1.3分别为00,10,01,则基础频率厂依次为100 Hz,1 kHz,10 kHz。
2.2 基准相位发生器
基准相位发生器由ROM2实现,ROM2的高两位地址A9,A8由单片机的P1.1和P1.0提供,低8位地址A7~A0与ROM1地址对应相连。ROM2分为4个区,每区有64个数据,分别代表了4组相差90°的正弦波信号值。由P1.0,P1.1选择不同的区域。当P1.1,P1.0分别为00,01,10,111,ROM2依次输出相位相差90°的正弦信号(相位参考基准信号)。
2.3 相敏检波器
相敏检波器由乘法型D/A转换器和低通滤波器构成。乘法型D/A转换器用于实现数字鉴相。ROM2输出的8位数字式基准正弦信号送到8位乘法型D/A转换器,与加至D/A转换器参考电压VREF端的被测电压UX(或US)相乘,再经低通滤波便得到被测信号UX(或US)在坐标轴上的投影分量。分析如下,先使P1.1,P1.0=00,设ROM2输出正弦信号为cos(ωt),被测信号UX=Umcos(ωt+ψ),经乘法型D/A后输出为:

再经低通滤波器后输出为Umcosψ,它是被测信号UX在x坐标轴上的投影。然后使P1.1,P1.0=01,实现90°移相操作,此时ROM2输出为cos(ωT+π/2),被测信号UX仍然为Umcos(ωt+ψ),D/A转换器输出为:

经低通滤波可以得到UX在y坐标轴上的投影分量Umsin ψ信号。
同理,可以得到US在x,y坐标轴上的投影分量。
3 结 语
本电路所采用的数字相敏检波器比传统的模拟相敏检波器具有无法比拟的优点。通过乘法型D/A转换器进行数字鉴相,减少了传统模拟鉴相器开关动作过程中出现的尖脉冲,提高了测量精度;两个相互垂直的相位参考基准信号通过ROM2准确获得,相位参考基准信号电路比模拟相敏检波器大大简化;此外鉴相器使用D/A转换器后电路的温度系数进一步减小。
1 系统组成及测量原理
基于数字鉴相的自由轴法RLC测量系统构成如图1所示,主要由正弦信号源U0、前端测量电路、相敏检波器、A/D转换器、微处理器、基准相位发生器以及键盘、显示电路等组成。
为了提高信号源精度,正弦信号源U0采用直接数字频率合成信号源(DDS)。R0为信号源内阻,RS是标准电阻,Zx为被测阻抗,A为高输入阻抗、高增益放大器,主要完成电流一电压变换功能。测量时,开关S通过程控置于Ux或US端。由图1有:UX=IOZX,US=-IORS,被测阻抗ZX为:
由式(1)可知,只要测出UX,US在直角坐标系中两坐标轴x,y上的投影分量,经过四则运算,即可求出测量结果。
图1中,被测信号与相位参考基准信号经过相敏检波器后,输出就是被测信号在坐标轴上的投影分量。相位参考基准代表着坐标轴的方向,为了得到每一被测电压(US或UX)在两坐标轴上的投影分量,基准相位发生器需要提供两个相位相差90°的相位参考基准信号。需要指出的是在自由轴法中,相位参考基准与US没有确定关系,可以任意选择,即x,y坐标轴可以任意选择,只需保持两坐标轴准确正交90°。UX,US和坐标轴的关系如图2所示。
应用图1测量时,通过开关S选择某一被测量(如UX),基准相位发生器依次送出两个相位相差90°的相位参考基准信号,经相敏检波器后分别得到UX在两坐标轴上的投影分量U1,U2。类似,当开关S选择US时,可分别得到US在两坐标轴上的投影分量U3,U4。各投影分量经A/D转换器可得对应的数字量,再经微处理器计算便得到被测元件参数值。
下面以电容并联电路的测量为例,推导RLC参数的数学模型。
由图2可得:
式中:Ni为Ui对应的数字量,e为A/D转换器的刻度系数,即每个数字所代表的电压值。
由式(2),式(3)可知:
直接通过对N1~N4数值的运算,即可完成矢量除法运算。
由式(1),式(4)可求得被测阻抗中的电容值CX及损耗角正切值DX。
式中:GX为介质损耗电导。
进而有:
同理可以导出被测参数R,C的计算公式。
2 正弦信号源与相敏检波器
在自由轴法测量RLC原理电路(图1)中,正弦信号发生器、相敏检波器及基准相位发生器是RLC测量仪的关键部分。
2.1 正弦信号源
为了保证RLC测试仪的精度,要求信号源U0产生的正弦信号波形失真小,幅值稳定。自由轴法中,还要求信号源频率和相敏检波器相位基准信号的频率相同。所以正弦信号源与基准相位发生器在电路上密切相关。为了保证测试精度,采用直接数字频率合成DDS技术产生正弦信号激励源。DDS具有系统稳定性强,以及相位、频率精确可调的优点。图3所示为采用DDS的正弦信号源及相敏检波器原理图。
图3中时钟信号CLK经分频器后,得到依次二倍频率关系的8路信号,作为ROM1的地址输入,ROM1存放有256个按正弦规律变化的数据,即每一个存储单元存储的样点数据与其地址之间的关系和正弦波的幅值与时间轴的关系一致。在分频器输出8路信号作用下,ROM1依次输出正弦曲线样点数据,经D/A转换器后输出阶梯正弦波,再经滤波、放大,就得到了测试用的正弦激励信号。信号基础频率由单片机的P1.2和P1.3控制,若P1.2,P1.3分别为00,10,01,则基础频率厂依次为100 Hz,1 kHz,10 kHz。
2.2 基准相位发生器
基准相位发生器由ROM2实现,ROM2的高两位地址A9,A8由单片机的P1.1和P1.0提供,低8位地址A7~A0与ROM1地址对应相连。ROM2分为4个区,每区有64个数据,分别代表了4组相差90°的正弦波信号值。由P1.0,P1.1选择不同的区域。当P1.1,P1.0分别为00,01,10,111,ROM2依次输出相位相差90°的正弦信号(相位参考基准信号)。
2.3 相敏检波器
相敏检波器由乘法型D/A转换器和低通滤波器构成。乘法型D/A转换器用于实现数字鉴相。ROM2输出的8位数字式基准正弦信号送到8位乘法型D/A转换器,与加至D/A转换器参考电压VREF端的被测电压UX(或US)相乘,再经低通滤波便得到被测信号UX(或US)在坐标轴上的投影分量。分析如下,先使P1.1,P1.0=00,设ROM2输出正弦信号为cos(ωt),被测信号UX=Umcos(ωt+ψ),经乘法型D/A后输出为:
再经低通滤波器后输出为Umcosψ,它是被测信号UX在x坐标轴上的投影。然后使P1.1,P1.0=01,实现90°移相操作,此时ROM2输出为cos(ωT+π/2),被测信号UX仍然为Umcos(ωt+ψ),D/A转换器输出为:
经低通滤波可以得到UX在y坐标轴上的投影分量Umsin ψ信号。
同理,可以得到US在x,y坐标轴上的投影分量。
3 结 语
本电路所采用的数字相敏检波器比传统的模拟相敏检波器具有无法比拟的优点。通过乘法型D/A转换器进行数字鉴相,减少了传统模拟鉴相器开关动作过程中出现的尖脉冲,提高了测量精度;两个相互垂直的相位参考基准信号通过ROM2准确获得,相位参考基准信号电路比模拟相敏检波器大大简化;此外鉴相器使用D/A转换器后电路的温度系数进一步减小。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底